目标跟踪最强算法开源 商汤SiamRPN系列解读 (目标跟踪有什么用)
雷锋网 AI 科技评论消息,日前,商汤科技智能视频团队首次开源其目标跟踪研究平台 PySOT。PySOT 包含了商汤科技 SiamRPN 系列算法,以及刚被 CVPR2019 收录为 Oral 的 SiamRPN++。此篇文章将独家解读目标跟踪最强算法 SiamRPN 系列。
背景
由于存在遮挡、光照变化、尺度变化等一些列问题,单目标跟踪的实际落地应用一直都存在较大的挑战。过去两年中,商汤智能视频团队在孪生网络上做了一系列工作,包括将检测引入跟踪后实现第一个高性能孪生网络跟踪算法的 SiamRPN(CVPR 18),更好地利用训练数据增强判别能力的 DAsiamRPN(ECCV 18),以及最新的解决跟踪无法利用到深网络问题的 SiamRPN++(CVPR 19)。其中 SiamRPN++在多个数据集上都完成了 10% 以上的超越,并且达到了 SOTA 水平,是当之无愧的目标跟踪最强算法。
项目地址:

以上动图中,红色框是 SiamRPN++的跟踪效果,蓝色框是 ECCV 2018 上的 UPDT 的结果,可以看出 SiamRPN++的效果更佳,跟踪效果更稳定,框也更准。从这个图也可以看出跟踪的一些挑战:光照急剧变化,形状、大小变化等。
SiamRPN (CVPR18 Spotlight):
在 CVPR18 的论文中(SiamRPN),商汤智能视频团队发现孪生网络无法对跟踪目标的形状进行调节。之前的跟踪算法更多的将跟踪问题抽象成比对问题,但是跟踪问题其实和检测问题也非常类似,对目标的定位与对目标框的回归预测一样重要。
研究人员分析了以往跟踪算法的缺陷并对其进行改进:
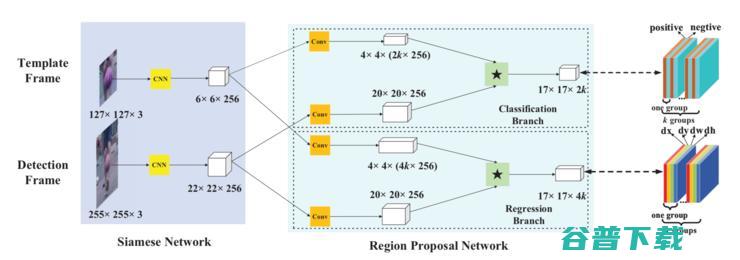
1. 大多数的跟踪算法把跟踪考虑成定位问题,但它和检测问题也比较类似 ,对目标的定位和对目标边界框的回归预测一样重要。 为此,SiamRPN 将跟踪问题抽象成单样本检测问题,即需要设计一个算法,使其能够通过第一帧的信息来初始化的一个局部检测器。为此,SiamRPN 结合了跟踪中的孪生网络和检测中的区域推荐网络:孪生网络实现对跟踪目标的适应,让算法可以利用被跟踪目标的信息,完成检测器的初始化;区域推荐网络可以让算法可以对目标位置进行更精准的预测。经过两者的结合,SiamRPN 可以进行端到端的训练。
2. 以往的滤波类的方法,没办法通过数据驱动的形式提升跟踪的性能。而 SiamRPN 可以端到端训练,所以更大规模的数据集 Youtube-BB 也被引入到了训练中, 通过数据驱动的形式提升最终的性能 。
结合以上两点创新,在基线算法 SiamFC 的基础上,SiamRPN 实现了五个点以上的提升(OTB100,VOT15/16/17 数据集);同时还达到了更快的速度(160fps)、也更好地实现了精度与速度的平衡。
DaSiamRPN (ECCV18):
SiamRPN 虽然取得了非常好的性能,但由于训练集问题,物体类别过少限制了跟踪的性能;同时,在之前的训练方式中,负样本只有背景信息,一定程度上也限制了网络的判别能力,网络只具备区分前景与不含语义的背景的能力。基于这两个问题,DaSiamRPN 设计了两种数据增强方式:
1. 孪生网络的训练只需要图像对,而并非完整的视频,所以 检测图片也可以被扩展为训练数据 。更准确的来说,通过对检测数据集进行数据增强,生成可用于训练的图片对。因此在 DaSiamRPN 中,COCO 和 ImageNet Det 也被引入了训练,极大地丰富了训练集中的类别信息。同时,数据量增大的本身也带来了性能上的提升。
2. 在孪生网络的训练过程中, 通过构造有语意的负样本对来增强跟踪器的判别能力 ,即训练过程中不再让模板和搜索区域是相同目标;而是让网络学习判别能力,去寻找搜索区域中和模版更相似的物体,而并非一个简单的有语义的物体。
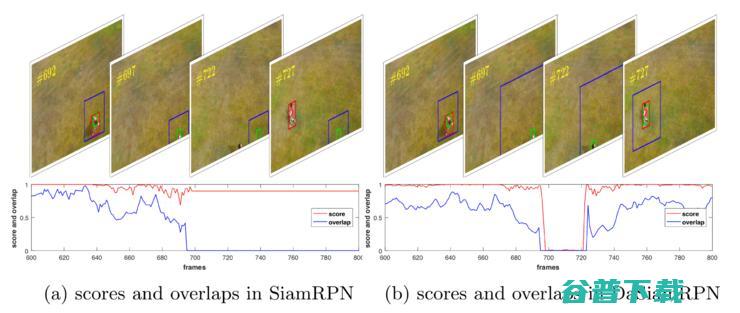
经过上述的改进,网络的判别能力变得更强,检测分数也变得更有辨别力,这样就可以根据检测分数判断目标是否消失。基于此,DaSiamRPN 可以将短时跟踪拓展到长时跟踪,并且在 UAV20L 数据集上比之前最好的方法提高了 6 个点。在 ECCV18 的 VOT workshop 上面,DaSiamRPN 取得了实时比赛的冠军, 相比去年的冠军有了 80% 的提升 。
SiamRPN++ (CVPR19 Oral):
目前,孪生网络中的核心问题在于现有的孪生网络目标跟踪算法只能用比较浅的卷积网络(如 AlexNet), 无法利用现代化网络为跟踪算法提升精度,而直接引入深网络甚至会使性能大幅衰减。
为了解决深网络这个 Siamese 跟踪器的痛点,商汤智能视频团队基于之前 ECCV2018 的工作(DaSiamRPN),通过分析孪生神经网络训练过程,发现孪生网络在使用现代化深度神经网络存在位置偏见问题,而这一问题是由于卷积的 padding 会破坏严格的平移不变性 。然而深网络并不能去掉 padding,为了缓解这一问题,让深网络能够在跟踪提升性能,SiamRPN++中提出在训练过程中加入 位置均衡的采样策略 。通过修改采样策略来缓解网络在训练过程中的存在的位置偏见问题,让深网络能够发挥出应有的效果。
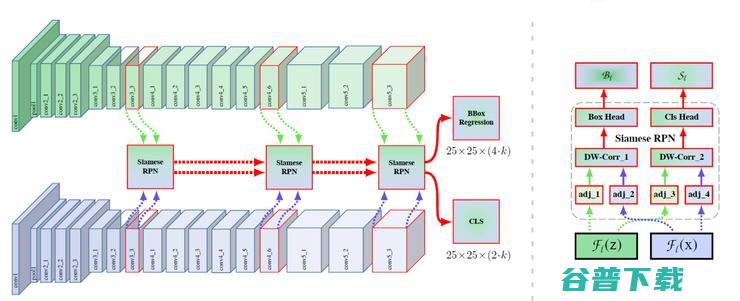
通过加入这一采样策略,深层网络终于能够在跟踪任务中发挥作用,让跟踪的性能不再受制于网络的容量。同时, 为了更好地发挥深层网络的性能,SiamRPN++中利用了多层融合 。由于浅层特征具有更多的细节信息,而深层网络具有更多的语义信息, 将多层融合起来以后,可以跟踪器兼顾细节和深层语义信息,从而进一步提升性能。
除此之外,研究人员还提出了新的连接部件,深度可分离相关层(Depthwise Correlation,后续简写为 DW)。相比于之前的升维相关层(UpChannel correlation,后续简写为 UP),DW 可以极大地简化参数量,平衡两支的参数量,同时让训练更加稳定,也能更好的收敛。

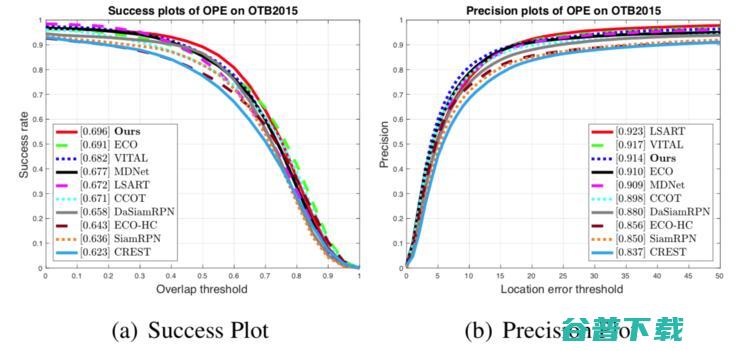
为了验证以上提出的内容,研究人员做了详细的实验。在比较常用的 VOT 和 OTB 数据集上,SiamRPN++取得了 SOTA 的结果。在 VOT18 的长时跟踪,以及最近新出的一些大规模数据集上如 LaSOT,TrackingNet, SiamRPN++也都取得了 SOTA 的结果 。
传送门:
目前相关代码现已上传至商汤科技开源目标跟踪研究平台 PySOT。PySOT 实现了目前 SOTA 的多个单目标跟踪算法,旨在提供高质量、高性能的视觉跟踪研究代码库,并将其灵活应用于新算法的实现和评估中。欢迎大家使用与交流!
PySOT 开源项目
参考文献:
Bo Li, Wei Wu, Qiang Wang, Fangyi Zhang, Junliang Xing, Junjie Yan, "SiamRPN++: Evolution of Siamese Visual Tracking with Very Deep Networks" (Oral) in Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2019
Zheng Zhu, Qiang Wang, Bo Li, Wei Wu, Junjie Yan, "Distractor-aware Siamese Networks for Visual Object Tracking" European Conference on Computer Vision (ECCV) 2018
Bo Li, Junjie Yan, Wei Wu, Zheng Zhu, Xiaolin Hu, "High Performance Visual Tracking with Siamese Region Proposal Network" (Spotlight) in Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2018
Luca Bertinetto, Jack Valmadre, João F. Henriques, Andrea Vedaldi, Philip H. S. Torr
"Fully-Convolutional Siamese Networks for Object Tracking" in ECCV Workshop 2016
Goutam Bhat, Joakim Johnander, Martin Danelljan, Fahad Shahbaz Khan, Michael Felsberg."Unveiling the Power of Deep Tracking" European Conference on Computer Vision (ECCV) 2018
版权文章,未经授权禁止转载。详情见 转载须知 。



快看漫画是引领行业的新生代漫画阅读平台和兴趣社区。它为用户提供优质原创漫画内容,营造良好的二次元社区氛围,成为年轻一代的潮流文化阵地。

-职业-会计财务网址

无锡市凯瑞特金属材料有限公司。

LOL网址导航网是专业的上网导航网站,精心收录各类优质热门网站信息,同时提供天气、快递、违章等各种生活便民查询工具网址,为您提供安全便捷的上网导航服务,现已被众多网友设为上网主页,网址导航大全首选LOL网址导航.

领峰企服专注注册公司代办工商,代理记账,注册商标,提供营业执照网上办理申请入口以及公司核名起名查询,我们提供最优惠的价格,最真诚的服务流程,在会计代理记账就找我们。

上海乐南傲科技有限公司是一家建材石灰生产公司,公司涵盖氧化钙、氢氧化钙、生石灰、熟石灰、石灰石粉等多个板块

游戏鸟-重度移动游戏垂直门户提供最新最好玩的手机游戏免费下载、手机网游攻略评测、手机单机游戏排行、手游放号礼包、玩家公会、玩家论坛等全方位的服务,是中国最专业的重度手机游戏免费下载门户.

FVFK官方网站

绍兴市玲龙建筑机械有限公司是一家专业从事建筑机械的研制开发、生产销售、租赁安装和维护保养的企业,主要产品有SCD200/200施工升降机、SC200/200施工升降机、SCH100/100施工升降机、SSB100施工升降机等建筑工程机械,我们的产品及服务广泛应用于房屋建筑行业。

东莞市品迪电子有限公司专业生产,耐高温拨动开关,硅胶轻触开关,贴片按键开关,防水dc插座,插件连接器,贴片耳机插座的供应商销售热线:郑先生15384224757

上海英鑫多实业有限公司是一家为集装箱行业提供配套门绳等零配件的公司,主要产品有各种规格集装箱零配件,不锈钢丝绳厂家,镀锌铁链条,合页标准/非标件定制,尼龙门绳,不锈钢链条,不锈钢拉簧,不锈钢门合页等,采购电话:13651753612


1月15日的小米发布会上,雷军在说完与美的的合作之后,提到了一个新产品,智能模块,,这是一个能够以手机为中心连接所有智能设备的产物,它直接使产品与平台挂钩,另外还提供通用云服务,打通了应用云、基础云、网络基础设备,并免费提供云服务给各大合作厂商,在未来最新版的MIUI上,也会集成这个控制App,不同于苹果HomeKit和海尔U,,是提...。

雷锋网AI金融评论报道,二月二十四日,代表比特币开发方利益的技术人员Cobra通过推特发表了其刊载于Medium的一封公开信,在这封讨论比特币的信中,作为bitcoin.org和bitcointalk.org管理员的Cobra主要谈到了两点,这封公开信毫无疑问是Cobra对比特币矿场主吹起的进攻号角,而吴忌寒在Cobra这条推文下回复...。

在连续失败了4次之后,SpaceX终于成功将Falcon9可回收火箭降落在了无人船上,并计划在今年再降落两次,过去一周可谓是ElonMusk职业生涯中最风生水起的一周,特斯拉Model3预定量超过32.5万,SpaceXFalcon9火箭引擎也成功降落在海洋之上,后者可谓是最具风险性的收获,Falcon9火箭引擎在进入国际空间站轨道后...。

历经前两年的低沉蛰伏,小鹏正在全面回暖,我都不提销量的要求,,小鹏汽车董事长、CEO何小鹏将小鹏汽车的发展比作马拉松长跑,,不用很长时间,大家会看到,小鹏磨刀不误砍柴工,假设销量是砍柴,我们最近十几个月都是以磨刀为主,果然,刀磨好了,砍柴的功力自然就显现了,今年下半年,小鹏汽车逐渐找到节奏,连续推出小鹏MONAM03和小鹏P7,两...。

现在父母对孩子的教育问题十分的重视,为了孩子可以得到更好的发展,所以会给孩子报名各种兴趣班,其中机器人培训班就非常的受欢迎,可以激发孩子的创意思维,也可以提升孩子的动手能力等等,所以受到家长的好评,机灵小匠是一家受欢迎的机器人培训机构,由于教学质量很好,所以受到家长的好评,但对于这个品牌不了解的新人,就十分的好奇,机灵小匠是会员制吗,...。

华阳陆地钻研核心、中国南海钻研院和中国国内法学会7月11日在京联结发布了,南海仲裁案判决再批驳,报告,所谓,南海仲裁案判决,出台距今已有8年,报告重申了中国对仲裁案以及仲裁判决的立场,强调中国政府不会抵赖仲裁庭作出的合法判决,也不会接受任何基于判决的主张和执行,近日,中方发布,仁爱礁合法,坐滩,军舰破坏珊瑚礁生态系统考查报告,黄岩岛...。
ElcomsoftWirelessSecurityAuditor是一款非常不错的一键破解无线wifi密码软件,它可以直接破解握手包,xp系统下速度非常快。

2021第17届温哥华国际女性电影节第十七届2022.3.8~2022.3.13简介温哥华国际女性电影节由温哥华电影电视界女性组织(WIFTV)主办,该组织成立于1989年,是一个由会员驱动的非营
绿色资源网提供丰富的素材资源下载,包括:图片素材、ppt素材、ps素材、边框素材、PS笔刷、矢量素材、矢量人物等,还有各种素材图标,以及其他素材。
iSlide(PPT一键插件),iSlide插件是一款强大易用的PPT一键化效率插件,iSlide拥有大量独特的PPT修改和设计功能,内置丰富的设计资源和模板,助你一键设计出各种高逼格的PPT,现在开始,让PPT设计变的简单起来!,您可以免费下载。

腾讯视频电脑版,腾讯视频播放器是腾讯视频旗下的客户端产品,支持丰富内容的在线点播及电视台直播,提供列表管理、视频音量放大、色彩画质调整、自动关机等等更强大的功能服务,您可以免费下载。

360云盘,360云盘是360推出的网络硬盘,官方安装版,解压即可使用360帐号登录。云盘拥有15G的超大免费空间,能够存放30000份工作文档,7500张亲人的照片,或者3000首你最爱的歌曲,从此海量内容,时时与你相伴,您可以免费下载。
来自站长之家消息,有站长表示已收到当地工商局电话,要求在节后至工商局办理工商备案,备案依据则是来自上半年新出台的,网络交易管理办法,由于该网站属于地方社区类型,社区内开设了二手交易的版块,这意味着,即便中小网站并非电商平台或进行商品销售,只要存在网络服务,并与用户产生消费关系,则有可能被认定为进行了网络交易的经营活动,根据,网络交易...。

电玩城早期俗称电子游戏机室,如今随着动漫产业的发展,电玩游戏节目也纳入了动漫产业的分支,所以,很多电玩城也开始有了时髦的称呼,动漫城,其实是动漫游戏城,电玩城是完全根据街机游戏机游戏为蓝本,自主研发移植到PC端的街机游戏,特点是摒除了实体街机单机游戏的单一性,实现全球互联网玩家同时进行操作游戏,大众参与性更强,娱乐性更高,网络版街机...。

一万年以后的世界是什么样子,你觉得是无比先进,但电影的假设是人类又回到了原始时代,一个茹毛饮血,鬼神崇拜的世界,小编今天参加了一场电影,一万年以后,的试映会,这是一部3D动画电影,不过我此行关注的不是电影本身,而是它号称,全球首款3D全景预告片,,现场还展示了,看片神器,——3Glasses和OculusRift,都是虚拟现实头盔,电...。

发表在专业问答2022,11,1109,42展示机型信息,品牌型号,当贝U1系统版本,当贝OS3.0当贝U1可以连接网线,因为当贝U1配备有网线接口,因此只需要将有线网线接到网线接口处即可连接有线网络,当贝U1可以连接网线吗当贝U1是支持连接网线使用的,因为当贝U1拥有丰富的接口,其中一个接口就是可以连接网线的LAN接口,只需要将有线...。

iPhonePro系列首次在印度生产
