德国学者用AI合成一亿像素逼真3D图像 可任意旋转 真实在右 虚拟在左 (德国 学者)

近日,来自德国埃尔兰根-纽伦堡大学的学者提出了一种新颖的神经网络方法,用于3D图像的场景细化和新视图合成。
只需要输入点云和相机参数的初始估计,就可以输出由任意相机角度合成的图像,360度旋转都不是问题。

研究人员表示,高效的单像素点光栅化让他们能够实时显示超过 1 亿个像素点的点云场景。
一亿个像素点是什么概念?说白了,这些3D图像太逼真了。
再看看合成图和原图的对比,简直和拍照没啥区别。

这项研究最近在推特上收到了很大的关注,网友纷纷回应:impressive!

同时,也有网友表示,这项研究确实利用了大规模动态输入点云的优势,而这原本是“超级难”的问题。

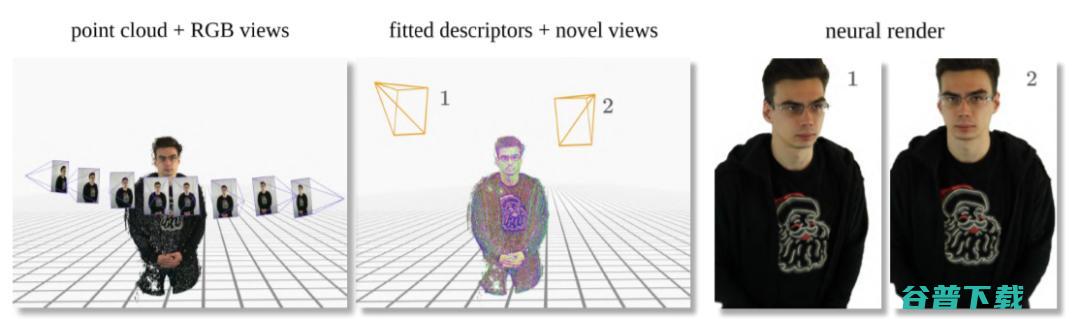
如下图所示,给定一组RGB图像和初始3D重建(图左),该渲染方法能够合成新的帧,并优化场景参数(图右)。


用神经网络自动学习合成高清3D图像已有成效,但之前还难以做到大动态的视角变换,他们是怎么实现的呢?
合成逼真的虚拟环境是计算机图形学和计算机视觉研究的热门领域之一。
其中,3D 形状的编码形式是非常关键的部分,人们通常会考虑三角形网格、体素网格、隐函数和点云,每种表示法都有各自的优缺点。
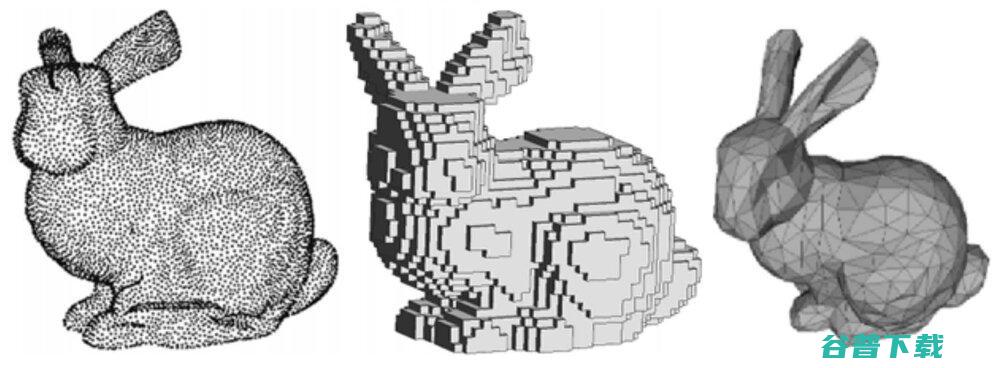
从左到右,分别是点云、体素、三角网格形式的兔子3D图像。
为了有效渲染不透明表面,人们通常选择三角形网格。
体素网格常用于容量表示,而隐函数适用于精确描述非线性分析表面(比如a^2+b^2+c^2=1,就是一个单位球面)。

另一方面,点云具有易于使用的优点,因为不必考虑拓扑性质,非常便于作为3D图像合成的中间输出阶段。不必考虑拓扑性质是指,无论是圆环还是球体,其表示形式都是一样的。

在2000年左右,点云渲染,尤其是点散布,已在计算机图形学中得到广泛研究。
与此同时,人们越来越关注基于图像的渲染技术。也就是基于粗略的、重建的3D模型以及已有的一组物体图像,来合成新的视图。
这些方法存在输入不精确的问题,例如,如果几何图形包含孔或输入图像没有完全对齐,则会出现伪影。
而基于神经图像的渲染方法使用神经网络来去除这些伪影,可以生成前所未有的如照片般逼真的高质量新视图。

Aliev等人则表明,将传统的点光栅化器与深度神经网络配对也是可行的。
这一发现对3D重建尤其有益,因为其通常使用密集点云作为初始输出。因此,我们可以跳过不必要的、可能出现错误的三角测量,直接可视化重建的场景。
在本文中,研究人员的方法建立在 Aliev 等人的管道之上,并以多种方法对其进行改进。
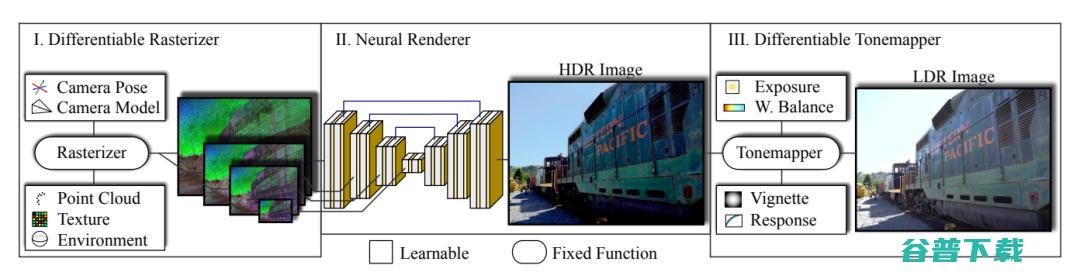
图2:基于点的HDR神经渲染管道概览。
如上图所示,由纹理点云和环境图组成的场景被光栅化为一组具有多种分辨率的稀疏神经图像。

深度神经网络重建HDR图像。

然后通过一个基于物理的可微色调映射器将其转换为给定新视点场景的 LDR图像。

在训练阶段,可以同时优化矩形框中的所有参数以及神经网络。
在整个管道中,他们特别添加了一个物理的、可微分的相机模型和一个可微分的色调映射器,并提出了一个公式,以更好地近似单像素点光栅化的空间梯度。
可微分的好处是,不仅可以优化神经点特征,还可以在训练阶段校正不精确的输入。
因此,系统可以根据神经渲染网络的视觉损失来调整这些参数:

得益于此,图像的渲染质量得到了显著提升。

此外,该方法能够合成任意的高动态范围成像(HDR,即大幅度的曝光变化)和LDR(低动态范围成像,容易缺失图像细节)设置,并校正曝光不足或过度曝光的视图(如下图所示)。

同时,深度神经网络内部的参数数量也显著减少,因为亮度和颜色变化由物理上正确的传感器模型单独处理。
如下表所示,与其他可微渲染器相比,本文的方法效率高出大约两个数量级。

表I:RTX 2080 Ti上1920×1080图像的正向和反向渲染时间(以毫秒为单位)。
因此,渲染性能提高了,过拟合伪影也减少了。
总而言之,这篇论文的研究成果如下:
• 用于场景细化和可视化的端到端可训练的基于点的神经渲染管道。
• 使用伪影几何概念的单像素点碎片的可微分光栅化器。
• 可模拟数码摄影镜头和传感器效果的基于物理的可微分色调映射器。
• 用于大型点云的高效多层渲染的随机点丢弃技术。
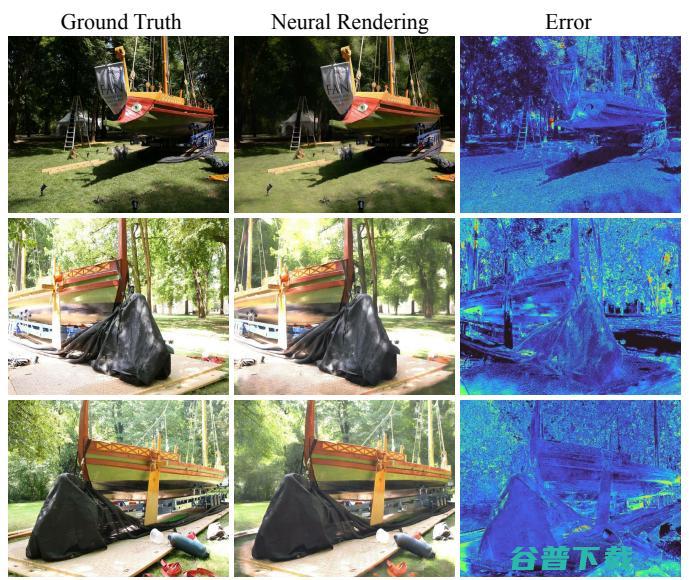

图11:在罗马船只数据集上合成的新视图。使用与参考照片相同的曝光值对图像进行渲染。在右列中,每个像素的误差都是可视化的。
我们再详细介绍一下模型管道。
管道的第一步是可微分光栅化器(图2左)。
它通过使用相机参数将每个点投影到图像空间,将其呈现为单个像素大小的碎片。
如果该像素点通过一个测试,它就会在神经网络输出图像中占据一个描述符。所有未被点着色的像素都由从背景颜色填充。
由于我们将点渲染为单个像素大小的碎片,输出的图像可能会非常稀疏,这取决于点云的空间分辨率和相机距离。
因此,以不同的比例渲染多个图层,使输出图像密集化,并处理遮挡和照明问题。

神经渲染器(图2中间)采用多分辨率神经图像生成单个HDR输出图像。
它由一个四层全卷积U-Net和跳跃连接组成,其中较低分辨率的输入图像连接到中间特征张量。使用平均池化执行下采样,并通过双线性插值对图像进行上采样。
研究人员主要使用门控卷积,它最初是为填孔任务而开发的,因此非常适合稀疏点输入。
总体而言,该网络架构类似于 Aliev等人提出的架构,只减少了一层,并进行了一些修改,以支持HDR成像。
首先,去掉批归一化层,因为它们将中间图像的均值和标准差归一化为固定值。这会使得总传感器辐照度(类似光强概念)丢失,并且无法从3D点传播到最终图像。
此外,如果场景的亮度范围相当大(大于 1 : 400),会以对数方式存储神经点描述符。否则,神经描述符将线性存储。对于对数描述符,在光栅化过程中将其转换为线性空间,以便卷积操作仅使用线性亮度值。

管道中的最后一步(图2右侧)是可学习的色调映射操作符,它将渲染的HDR图像转换为 LDR。
该色调映射器模拟数码相机的物理镜头和传感器特性。因此,它最适合捕捉智能手机、数码单反相机和摄像机的LDR图像。

尽管合成效果如此惊艳,在实验中,研究人员也发现了一些局限性。
其中一个限制是,由于不同参数的数量巨大,不容易寻找合适的超参数。必须平衡纹理颜色、结构参数、色调映射设置和神经网络权重的学习速率。为了找到适合所有场景的可行设置,需要进行广泛的网格搜索。
另一个限制是,点位置的优化对于中到大的学习率是不稳定的。因此,该管道需要合理的初始点云,例如,通过多视图立体系统或 LiDaR 扫描仪。
研究人员认为这个问题是由光栅化过程中的梯度逼近引起的。它适用于相机模型和相机角度优化,因为数千个点的空间梯度在一个优化器步骤中得到平均。然而,对于位置点梯度,仅使用单个近似梯度来更新其坐标。因此需要非常低的学习率来平均点梯度随时间的变化。
最后,由于是单像素点渲染,当相机离物体太近或点云非常稀疏时,可能会出现孔。这是因为神经网络结构只能填补一定大小阈值的洞。在实验中,研究人员通过人为地增加点密度来减少这个问题。然而,这并不是一个普遍可行的解决方案,因为在自由视图环境中,用户仍然可以任意移动相机以靠近物体表面。研究人员表示,他们未来的工作应该会从这里开始,例如,可以尝试在放大过程中动态生成具有内插神经描述符的新点。

版权文章,未经授权禁止转载。详情见 转载须知 。



视听聚合易支付是北浔网络旗下的免签约支付产品,完美解决支付难题,一站式接入支付宝,微信,财付通,QQ钱包,微信wap,帮助开发者快速集成到自己相应产品,效率高,见效快,费率低!

湖南双兴钢纤维有限责任公司致力于钢纤维,湖南钢纤维,长沙耐热不锈钢纤维,湖南耐热不锈钢纤维厂家,长沙不锈钢纤维价格,以“诚信为本,质量过硬,让利客户,服务到位”为宗旨,进一步提升品质,完善服务,加强与各界新老客户朋友的精诚合作!

豆果美食下饭菜栏目为您推荐下饭菜做法大全,下饭菜怎么做好吃技巧分享,下饭菜最正宗的做法和下饭菜家常做法推荐,更多下饭菜的简单做法就来豆果美食。

北京科迪赛瑞光电科技有限公司为专业的镀膜产品生产商,光学元件加工商,激光光学专业制造商。目前已发展成国内知名的光学设计、光学元件加工以及激光光学类产品配件供应商。

数码乐园网站致力于展现最前沿的数码科技成果,涵盖各类数码装备的评测与推荐,科技前沿的动态追踪,创新驱动的发展力量以及对智能未来的无限畅想,为数码科技爱好者提供一个全面而深入的交流平台。

鞍山市顺达建材科技有限公司(原名鞍山市顺达防水材料有限公司),是集生产,工程技术服务于一体的专业防水材料,保温材料生产厂家,公司年生产能力SBS防水卷材1000万平方米以上,AD-水泥基渗透结晶型防水涂料5万吨以上,AD-A级防火发泡水泥保温板5万立方米以上,并承揽大型地下室防水堵漏维修。本企业通过ISO9001:2000国家质量体系认证,是多次经过辽宁省建设厅推荐认定的防水材料,保温材料专业生产厂家,是国家防水协会会员,辽宁省防水协会理事单位。公司技术力量雄厚,生产工艺,设备先进,检化验设备齐全。本公司是为客户提供一流的产品,一流的服务,为用户排忧解难,竭诚为广大客户服务。

内蒙古自治区阿尔山市人民法院

闻世手抄报提供素材范文、手抄报、简笔画、黑板报、折纸等图片大全以及各种文库资料等,希望能够帮助大家解决碰到的问题。

欢迎来到以用户体验为优先的雨云,我们提供稳定高速的国际虚拟主机,云服务器产品,强大的功能,高效率的客户支持,简洁易用的面板,值得您的信赖

九一游网络科技有限公司

中山忠兴物流公司是一家从事中山到全国的陆运、空运、海运物流服务的物流公司。中山忠兴物流以快捷、准时、安全、优惠的服务宗旨为广大客户服务!

博客中国(blogchina.com)于2002年8月由博客教父方兴东创立。作为中国博客发源地,博客中国汇聚国内众多具新锐思想的知名博客,是中国最具影响力的博客平台。“每天5分钟,给思想加油”是我们的宗旨!


今年年初,腾讯推出了酝酿已久的腾讯信用,意欲对标芝麻信用,不过仅上线公测一天就莫名下线,现在,腾讯又悄然上线了,腾讯游戏信用,,基于腾讯游戏安全中心针对玩家在腾讯游戏中的账号信息、日常活跃、游戏资产、安全贡献、作弊处罚等多维度信息,通过大数据计算,综合得出的对玩家游戏信用水平的评分,评分越高表示玩家的游戏信用越好,据了解,经常玩游戏、...。

锡纸花甲米线,是小吃行业中,受欢迎度比较高的一款美食,所造成的市场购买力是让很多创业者都是有了想要开店的想法,对一些没有经验的创业者来说,想要选择一家好的品牌进行加盟,从而收获轻松的创业,线上花甲以深受欢迎的美食系列是吸引了创业者的关注,大家都知道对于门店的开设,拥有较好的选址,是能够促进发展,而开锡纸花甲米线店,线上花甲告诉你如何正...。
开一家孩子读书的书房,需要做什么准备呢,书果星球将从八个方面为您讲解,一、选址,考虑住户多的小区,或者周围有小学更好,沿街社区底商1楼,2楼和社区综合中心是优选,二、办证件,1、营业执照,工商部门办理,,经营范围选择出版物零售、教育咨询服务、文化艺术交流策划,2、出版物经营许可证,文广新局办理,,提供营业执照、公章法人章、经营人身份证...。

三个先森采用多种制作工艺,24小时腌制,大火油炸,肉质鲜嫩口感,三个先森凭借核心物料,鲜嫩多汁的口感和特色制作工艺三大核心,店内所有产品,亲民价格,大众消费,好吃不贵,...。

七月三号自己在苏宁自营的一个店铺外面购置了六十枚驱蚊贴,过后他店铺上方写的是常年驱蚊防蚊贴,正是他宣传的这个驱蚊成果,所以我才选用在他们家购置这个驱蚊贴,然而没想到收到货,我经常使用之后发现没有成果,而且他这个产品上方并没有农药注销证号,没有农药注销证号的话那它这个就不能宣驱蚊没成果,他这个不就是妥......。
我在抖音上了解到安徽登高而歌网络科技有限公司正在开设视频带货的课程,他们宣传并承诺经过学习他们的课程可以成功流质变现独立做视频带货,并且繁难易学还高收益,于是我在他们的诱导下交了学费想要学习带货,然而交完费我发事实践状况与他们承诺的不分歧,不只学不到物品而且也没挣到钱,所以我需要对方退款,然而对......。

电脑优先豌豆荚app下载装置流程如下,1、在豆荚正版官方下载最新版的豌豆荚装置包,双击运转,之后就会关上豌豆荚的装置导游,可以选用间接点击界面的上的立刻装置按钮,这样软件会以程序自动设置模式装置,2、选用自定义装置,点击装置界面的右下角小图标,选用文件夹开局装置,点击门路前面的阅读按钮为豌豆荚电脑版软件选用一个适合的位置即可,苹果手机...。
baguane文件夹曾经存在,能否要消费文件夹,开局界面,startmuen,的快捷模式生成失败你先把原本装置的文件删除掉,从新装置一下试试,假设还不行就关上光驱内有没有游戏文件,假设有的话,间接复制到你磁盘里,用这个方法可以替代装置,不过只要一局部游戏可以在光驱内间接找到镜像文件,假设这个方法不行,就去找找有没有免cd补丁,いっぱい...。

咱们的电脑刚买上来都会有自带的系统,然而经常使用久了之后会遇上大大小小的疑问,有些疑问随便就能处置了,有些疑问却很难处置,普通面对难处置的疑问,咱们都会选用重装系统,那么小编给大家介绍一款重装系统的软件,那就是,小白一键重装系统,,那么小白一键重装系统该怎样经常使用呢,接上去小白就给大家带来小白一键重装系统的经常使用方法,详细方法如下...。

装备了1353TL4发起机,发起机最大功率是96kW,峰值扭矩为211牛·米,婚配7挡双离合变速箱,最高车速200kmh,工信部综合油耗为53L100km性能性能方面,起亚K3装备车道坚持辅佐系统主副驾安保气囊车道偏离预警系,款改款15LCVT青春版是不少生产者所关注的车型,上方小编就为大家简明引见一下这款车,顺便再算算买它须要多少钱...。
6日由优酷、灿星联合出品的大型街舞选拔类真人秀《这就是街舞》第二季复赛第2轮即将播出,高能大秀来袭,队长亲自上阵;同盟内战虐心上演,淘汰赛制残酷,选手泪洒当场。为舞而战强强对决,超燃气氛感染全场!

蛇年祝福图片,2013蛇年马上就要到了,当然少不了2013蛇年祝福图片,小编收集了17张很喜庆的打包放给大家,可以在过春节的时候发送给亲朋好友,您可以免费下载。

近日,,第31届全国图书交易博览会少儿阅读节,在济南山东国际会展中心举办,大连出版社作为参会方,特邀济南历下书果星球儿童阅读馆加盟店的果儿们来到博览会,在炎热的夏季,感受阅读所带来的心之清凉,活动现场,大连出版社邀请,少年冒险王,的作者、探险家彭绪洛老师,跟济南历下书果星球儿童阅读馆加盟店的果儿们一起参加启动仪式,并开展了一堂难忘的现...。

时间是个可恶的东西,它总会让你遗忘一些人或一些事,当然,有些人是被我们遗忘的,而有些人是被时代遗忘的,比如说搜狐的创始人张朝阳,如今再提互联网,再提互联网大佬,对于95后、00后来说,他们脱口而出的准时阿里巴巴、腾讯和马云、马化腾,鲜有人会提起张朝阳,甚至他们根本不知道张朝阳是谁,张朝阳是谁?如果把时间倒退回20年前,马云、马化腾们只...。

当夏季来临的时候,冰淇淋也迎来了不错的季节,不少智慧之选者在看到这一时效性项目时,纷纷想要智慧之选做冰淇淋生意,但作为时节性的项目,租店面卖的话必定是不合算的,而使用冰淇淋车是非常明智的选择,冰淇淋车的特点就是想到哪里卖就到哪里卖,经营方式灵活,那么冰激凌车多少钱,如果你也想智慧之选这个项目,那不妨继续往下看吧,冰激凌车是什么样的,冰...。
我们的美容养生行业发展速度是很快的,也是收获经济收银很高的行业,群芳泽中医养生作为一个在市场中非常有知名度的品牌,将传统的中医养生保健理论和现代化营养学说相结合,利用内调外养的形式进行体质的调理和保健工作,为消费者的身体健康带来了真正的福音,另外做过行业内的带头品牌,该项目总部依靠自己的技术实力和团队力量建立起更完善的服务推广机制,为...。

说到重庆,雷锋网编辑脑海中首先浮现的就是飞越长江的索道,穿楼而过的轻轨,宛如迷宫的立交桥,可刷公交卡的电梯,诙谐直爽的方言,流光溢彩的夜景以及百吃不厌的重庆火锅,但据一位在重庆生活了二十几年的,原著民,称,重庆的标签不止于此,当然,重庆的目标也不是成为网红打卡地,网红,重庆不甘网红重庆是个多雾的城市,所以有人说,这是一个不靠近,就不...。
