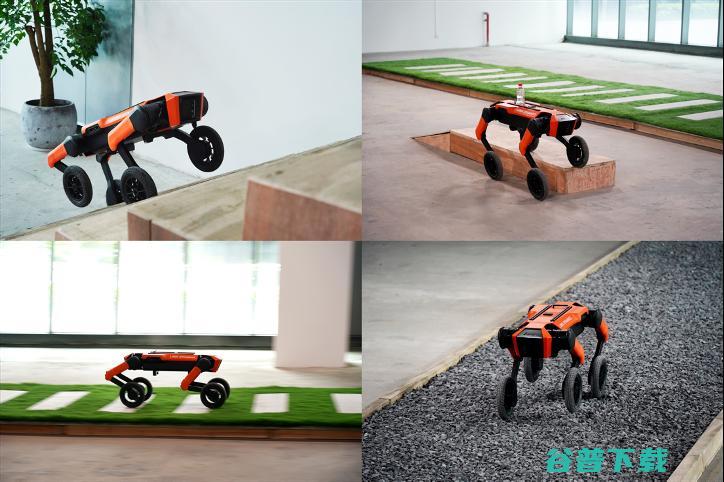
通用底盘 四轮足机器人W1 发布首款 逐际动力要打造足式机器人 (四轮驱动底盘)
消息,9月25日,通用足式机器人公司逐际动力「LimX Dynamics」正式发布首款全自研“四轮足机器人W1”,主要用于工业巡检、物流配送、特种作业、科研教育等场景,并且将于2023年第四季度开始接受预订。
据了解,W1基于逐际动力「运动智能Motion Intelligence」研发,将腿式和轮式结构相结合,搭载了自研的高性能关节,具备实时地形感知与全地形移动能力,在效率上比单纯的足式机器人更高效,适用场景也更加丰富、复杂。
具体来看,W1已成功通过多个复杂应用场景的能力验证:
逐际动力创始人张巍表示,四轮足机器人需要具备几乎四足机器人所有的能力,但是轮足混合带来的感知干扰、状态估计和运动控制的挑战却成数倍增加,难度极大,并且市面上也没有成熟的解决方案。
因此逐际动力选择自研方案,将感知能力与运动控制进行结合,利用在地形感知、强化学习、多刚体动力学、混杂动力学、模型预测控制等领域的学术和研发经验,建立领感知与控制融合的算法框架,实现更高稳定性、更强实时性的控制能力。
张巍认为,通用足式机器人正处于技术爆发期,基础研究与商业化的交集已经出现,并不断扩大。逐际动力要打造具有全地形移动能力的高效通用底盘,W1则是逐际动力的首款产品。
未来,逐际动力将通过技术研发与创新,解决更多足式机器人落地的难题,推动足式机器人走进产业,创造价值。
原创文章,未经授权禁止转载。详情见 转载须知 。


国内知名品牌知音漫客官网,飒漫画杂志授权网络阅读平台,创办十余年,凝聚大批漫画家和粉丝,拥有斗破苍穹漫画、风起苍岚、寻找前世之旅、血族禁域、哑舍漫画、龙族漫画等海量优秀漫画。免费、快速、正版、高清、无广告!看国漫请认准知音漫客网

曲阳渤言雕塑有限公司专业制作设计各种雕塑,其中包括:石雕、青铜雕塑、铸铜雕塑、石雕牌坊栏杆等产品,可以按客户要求制定,产品造型庄重典雅、古朴大方,有非常大的观赏性。

宿商宝为中小企业免费提供商机、信息发布、品牌营销的同时也提供了个人信息版块,满足您免费查看和发布产品信息的需求。

上海天也网络科技有限公司是上海先进的做网站公司,主营上海网站建设,上海做网站,公司网站建设,上海公司做网站,嘉定安亭花桥做网站可根据客户要求定制,天也服务热线:021-68310879

江西又名赣,八一起义所在地,著名景点有庐山、井冈山、红都等。江西省报是江西日报,网络媒体是大江网,主要内容是江西新闻,报社下属子报包括信息日报、江南都市报、今日家庭报

立友脱水筛厂家为你说明一下脱水筛和直线筛其实就是一种脱水筛机,扩展名有振动脱水筛,泥浆脱水筛,尾矿脱水筛,矿用脱水筛,高频振动脱水筛.请致电13782587121了解脱水筛价格.

****长沙深之蓝装饰面板材料厂坐落于美丽的长沙县—江背镇,拥有自己的专利商标品牌—深湘。得到广大消费者信赖。我厂专业生产、加工厚度2—25mm、宽度1.22—1.83m、长度2.44—2.74m各式亮光、哑光、麻面、水晶面、浮雕面等装饰贴面板,具有无毒、无味、无污染,防潮、阻燃、防腐蚀,表面坚硬耐磨、光洁度好,免刷油漆、花色品种全、使用方便、装饰效果好等特点,并且其产品广泛应用于板式家俱、儿童家俱、办公家俱、厨具、校具制作和室内、地板、广告牌、汽车、火车、轮船等方面装饰装修。我们厂制造的产品风格流行、花色新颖、引领时尚,是当前装饰板材市场流行的系列环保新产品,能适应客户需求,提高装饰品质,促进行业发展。我厂本着以诚为本、以客为尊、以质量求生存、诚信服务的宗旨发展生产,拓展市场。此外是其已销往河南、河北、山东、安徽、湖北、广东、四川、山西、新疆等十多个省市,深受用户赞誉,我们竭诚欢迎新老客户光临指导,洽谈业务,互利合作。长沙深之蓝装饰面板材料厂秉着质量**,诚信经营的宗旨,竭诚为广大客户提供优良的产品和服务。公司于2011年成立贸易部,生产兼经营贴面板,刨花板贴面,密度板贴面,防火板贴面等各类板材。以满足用户心灵需求为出发点,以良好的售前售后服务为基本点,以追求高科技、低成本、低价位为着重点,以质量优等、稳重可靠为落脚点,竭诚为您服务。22**qq:123658751手机号:1332654875座机:0515-4423654邮件:skd@df.sdfsemail:ssdf@sdf.sdff公司地址:北京朝阳北路100号

慕残网,慕残网站,慕残交友,慕残交流,慕残论坛,慕残文化,慕残视频,慕残小说,慕残截肢,慕残轮椅,慕残儿麻,慕残征婚,慕残照片,慕残直播
有限公司")
普瀚辰电子产品(北京)有限公司是中央空调自控产品HVAC的专业制造商,主要生产防火排烟驱动器,弹簧复位执行器,风门驱动器,风阀执行器等,目前执行器年生产能力达到100万套,产品广泛应用于各类通风,消防,热交换等相关场所

西安海程科技有限公司

让更多的人分享互联网开发技术

CANNYWELL如臯志乐电子科技有限公司【主营】插座式滤波器、单相滤波器、客制化滤波器、三相滤波器、医疗级滤波器、直流滤波器、家电滤波器等,服务热线:153-6638-2899

1月24日,哔哩哔哩,以下简称,B站,宣布与全球最大规模的手办模型展WonderFestival,以下简称,WF,主办方、日本知名玩具制造商海洋堂达成合作,获得WF中国大陆地区独家主办权,从2024年起,B站将在中国大陆地区举办WF线下展会活动,为全球手办模型品牌方、IP方、创作者和爱好者提供交流平台,创立于1984年的WF一直深...。

2021年12月10日,由雷锋网新智驾主办的第四届全球智能驾驶峰会将在深圳拉开帷幕,作为重磅嘉宾之一,零念科技联合创始人兼CEO柯柱良将在会上发表重要分享,柯柱良,零念科技联合创始人兼CEO,先后供职于华为、德国大众、TTTech,并主要负责自动驾驶项目的开发工作,在TTTech工作期间,他从2012年参与负责全球第一个L3自动驾驶域...。

在特斯拉彻底引爆Robotaxi行业不到一周,中国头部自动驾驶公司小马智行宣布赴美IPO,冲击,全球Robotaxi第一股,北京时间10月18日凌晨,小马智行,Pony.ai,正式公开向美国证券交易委员会,SEC,提交IPO招股书,计划在纳斯达克挂牌上市,股票代码,PONY,高盛、美银美林、德意志银行、华泰证券为其担任主承销商,根...。

发表在投影使用教程2023,3,2310,55随着投影技术的逐渐成熟,低价的LCD投影受大量用户追捧,因此各类单片LCD投影机百花绽放,然而亮度虚标的问题严重,对消费者造成了不小的困扰,基于目前行业现状,由当贝等数家主流投影品牌牵头,中国电子视像行业协会及其会员单位与电商平台方联合发布了中国CVIA亮度标准,因此哈趣投影作为单片LCD...。

安装当贝市场U盘安装教程,1.通过当贝市场官网,www.dangbei.com,下载TCL专版软件包2.解压TCL专版软件包后,会有两个apk文件,一个是当贝市场安装包,一个是TCL解除安装限制,后面会用到,将这两个文件复制到U盘中3.将u盘插到上,找到,电视卫视,应用管理,极速安装,,找到U盘4.打开u盘,先将TCL解...。

这个我的附属博客,原本想建立来记录一下随笔,可发现,并不是每天都有那么东西可写,另一方面也是因为自己太忙,这个微博客的内容很杂,最近思考了一下我的主博客未来发展方向,但但靠一些网站技术方面的文章,我想应该不是长久的办法,等到自己30岁的时候,我肯的那个写不出这样的技术性文章了,互联网科技的新闻与评论,目前的大多数个人博客在写的东西,总...。
[全球网报道]据台湾,中央社,7月10日报道,美国参议院军事委员会外地期间8日正式将2025财政年度,国防授权法案,提交全院审议,条文包含允许台湾安保、抗衡中国大陆,以及需要美国防部为台湾设区域紧急库存,关于这一信息,有岛内网友评论称,,美国是多宿愿咱们抗争!,台湾,中央社,引述美媒报道,2025财政年度,国防授权法案,将提供9199...。

18万1千八到33万9千八,其中最低为2.0手动挡,最高为3.5顶配V6版`广州本田的价位品牌共有15款系列72款车型2665车型图片籍贯,国际多少钱范畴,8.68,34.80万元主力车型,第八代雅阁飞度型动派广州本田大略多少钱广本奥德赛2.4多少钱,20.38万,27.48万飞度1.3多少钱,7.48万,10.48万思迪1.3多少钱...。
办好中国的事件,主要在党,主要在保持党的片面指导,党的指导是党和国度的基本所在、命根子所在,是全国各族人民的利益所系、命运所系,中国共产党是中国特征社会主义事业的指导外围,党的指导位置不是自封的,而是历史和人民的选用,而且是历史和人民的选用的结果,中国共产党是中国工人阶层的先锋队,同时是中国人民和中华民族的先锋队,是中国特征社会主义事...。

拍照软件b612咔叽app是一款广受好评的手机美颜相机,b612咔叽是热门拍照神器b612和snow相机的融合版,强强联手,功能更为丰富,一键美颜加滤镜,海量贴纸随心选,动物耳朵、鼻子轻松贴,还可以自己制作表情包哦,喜爱的朋友赶快安装体验吧!官网介绍大合璧~SNOW相机
火绒安全软件是一款集防病毒、反黑客、反流氓软件、终端防护、网络防护、访问控制、自定义规则等功能为一体的终端安全软件,功能完备而专注、资源占用小、操作简单
三星CLX-3185打印机驱动是三星CLX-3185打印机的官方驱动软件,只有正常安装了对应型号打印机的驱动才能够运行打印机进行打印和扫描的功能,有需要的可以下载使用。基本简介产品类型:彩色激光多功能一体机产品功能:打印/扫描/复印打印分辨率:2400600dpi打印尺寸:A4打印速度:黑白16页/分;彩色4页/分内存:32MB接口:USB2.0硬件ID:USBPRINT\SamsungCLX-3180_SeriCB1C功能介绍该
品尝奶香浓郁的糖果会有醉心之感,丝丝甜意自舌尖传递至心田,甜蜜的感觉自然而然的荡漾开来,这种糖果已然成为孩童以及年轻男女所喜好的产品,而在众多的糖果品牌中,阿尔卑斯糖果显然是这当中较具优势的存在,作为全球较大的糖果生产企业旗下所推出的糖果品牌,它无论是在品牌的制作工艺还是在销售渠道搭建方面都是逐渐完善的,从这样的角度来看,阿尔卑斯糖果...。

上班族在长期的加班工作中,身体就会出现疲劳,咖啡就可以缓解劳累,能够起到提神的作用,咖啡也受到了广泛白领的青睐,现在市面上还出现了很多连锁咖啡店,店内生意不断,街猫咖啡就是一个受欢迎的连锁品牌,市场的影响力大,还吸引了很多消费者的关注,如果想要加盟开店的话,究竟街猫咖啡加盟费用是多少,街猫咖啡的公司总部是在广州,公司总部拥有多年的创业...。

之前买了本金枪大叔的书,借势,,看完很受启发,里面有些观点我非常认可,比如,很多人总喜欢看身边人失败,这种感觉简直比自己成功了还要爽,但事实上停留在一个远不如你的圈子,和停留在一个都比你优秀的圈子,显然后者对你意义更大,因为你能向上借势,而不是向下兼容,但绝大多人宁可委曲求全生活在一个远不如自己的圈子里,宁可被人排挤,被人辱骂,被人牵...。

二机一中,现名,内蒙古北方重工集团第一中学,原名,内蒙古第二机械制造总厂职工子弟第一中学,,创建于1959年,学校现有教学楼两座,博雅楼、厚德楼,,多功能综合楼一座,开智楼,,功能齐全、设备先进,运动场馆面积共平方米,包括300米跑道的操场,200平方米的乒乓球馆,排球场两个,篮球场四个,北重一中,位于包头市青山区富强路10号,占地面...。

当你在某搜索引擎里面还只写下几个字而后面半句话就已经自动出现的时候,如下图,,有没有想一下这是为什么,是的,在一个人人都离不开网络的时代,你在网上的一举一动、一言一行都留下了足迹,搜索引擎之所以能够联想出你的下半句,那是因为你并不孤单,你想搜索的、在世界的各个角落,你并不认识的同伴们也在搜索,于是,有一群看热闹不嫌事大的程序猿们,专门...。
