寻路算法的可视化解释 关于 Dijkstra A* BFS (寻路算法的可行性)
译者:AI研习社( 季一帆 )
双语原文链接: Interactive PathFinding
点此链接进入交互展示页面:
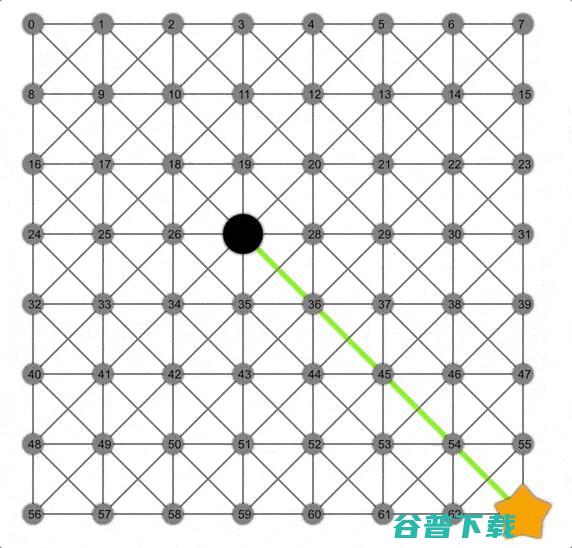
广度优先搜索、Dijkstra和A*是图上的三种典型路径规划。它们都可用于图搜索,不同之处在于队列和启发式函数两个参数。
本项目探索并可视化不同算法如何根据选择参数进行图搜索。
算法的一般性原理如下:
将边界初始化为包含起始节点的队列。
当边界队列不为空时,从队列中“访问”并删除一个“当前”节点,同时将访问节点的每个邻居节点添加到队列,其成本是到达当前节点的成本加上从当前节点访问邻居的成本再加上邻居节点和目标节点的启发式函数值。其中,启发式函数是对两个节点的路径成本的估计。
存储访问路径(通常存储在cameFrom图中),以便后续重建路径。如果邻居节点已经在列表中,同时新路径的成本较低,那么更改其成本。
找到目标路径(提前退出)或列表为空时,停止算法。
使用先进先出队列实现BFS。这种队列会忽略路径中链接的开销,并根据跳数进行扩展,因此可以确保找到最短路径的跳数,而跳数相关的成本。启发式函数的选择是任意的,因为在这个过程中其并不起作用。
使用数组可实现先进先出,即将元素附加到末尾并从头删除。
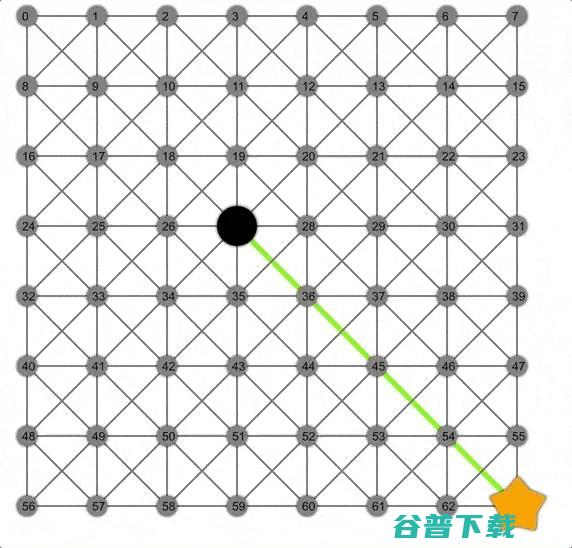
在图上使用优先级队列和始终返回0的启发式函数,便得到Dijkstra。
相比于BFS,Dijkstra最大的不同在于考虑了成本。通过该算法,可以根据节点到节点的成本找到最短路径。
优先级队列使用数组实现,在每次插入新节点后对该数组进行排序。尽管实现优先级队列还有其他更高效的方式,但在我们的场景中,数组是足够快的,而且实现起来也简单。
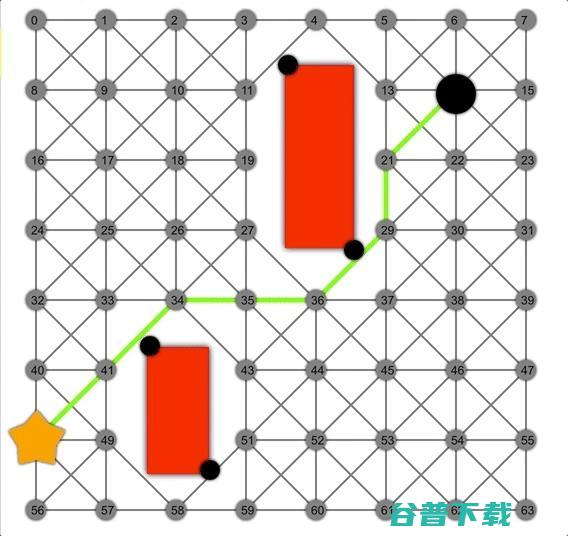
为实现A*,需要传递一个实际启发式函数,例如两个节点之间的欧式距离。通过“节点成本”+“节点到目标节点的估算成本”对节点进行加权,通过优先搜索更大可能的节点加快搜索速度。
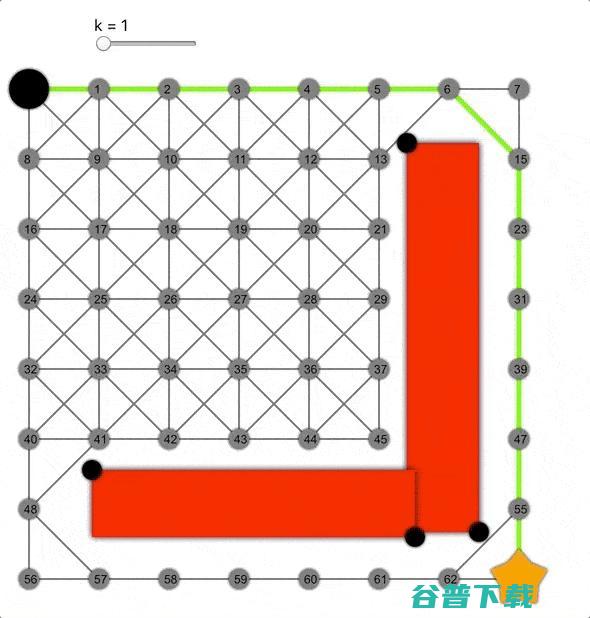
非允许的启发式函数
只有应用可允许启发式函数,A*才能找到最短路径,这也意味着永远不会高估实际路径长度。由于欧氏距离是两点之间的最短距离/路径,因此欧氏距离绝不会超出。
但如果将其乘以常数k>0会怎样呢?这样会高估距离,成为非允许的启发式函数。
实现
本项目通过script实现,以便读者在Web上进行访问。另外,我使用react渲染UI,使用react-konva渲染图形。
路径发现是指接受队列类型和启发式函数,并返回另一个函数,即真实路径发现(称为currying)。
这样,用户每次更改设置后,都会使用确定参数创建一个新的路径发现函数,并将之用于图搜索。
为可视化路径发现的步骤,我使用javascript生成器,这意味着函数返回一个迭代器,而不仅仅是一个值。因此,访客在每一步都可以生成算法的整个状态,并将其保存到数组,然后通过页面顶部的滑块显示特定状态。
AI研习社是AI学术青年和AI开发者技术交流的在线社区。我们与高校、学术机构和产业界合作,通过提供学习、实战和求职服务,为AI学术青年和开发者的交流互助和职业发展打造一站式平台,致力成为中国最大的科技创新人才聚集地。
如果,你也是位热爱分享的AI爱好者。欢迎与 译站 一起,学习新知,分享成长。

版权文章,未经授权禁止转载。详情见 转载须知 。



凌风云搜索是互联网专业的阿里云盘,百度网盘等十大网盘搜索引擎,是网盘资源搜索中心.

保定市民科环境检测有限公司创建于2003年10月份,依法注资500万元,地处具有古城之称的河北保定,位于繁荣的商务中心地段,环境优雅卓越,办公设施正规齐全,实验设备先进一流,是一家长期致力于环境(水、土壤、噪声、大气、固废、污染源)、辐射、油气回收、职业卫生评价等以检测为主的具有独立法人地位的股份


起名星宝宝起名网是专业的宝宝取名网站,可根据宝宝的生辰八字为您提供最理想的宝宝名字。

提供原装正品NSK模组批发、现货销售,安装拆机NSK模组服务,覆盖黑龙江、深圳、重庆、山东、北京、广西、浙江、贵州、吉林、陕西、河北、湖北、江苏等地,满足您的多样需求。

同城信息网,提供大家生活免费发布信息平台,相当于各城市的信息港,可以免费发布分类信息,同城信息,商业信息,服务信息等各个行业信息

成都医学戒瘾中心向您详细介绍网瘾症状,网瘾治疗方法,网瘾吃什么好,擅长解决网瘾的心理咨询师。网络成瘾(Internetaddiction,IA)是指由神经内分泌紊乱引起的,以精神症状、躯体症状、心理障碍及人格改变为主要临床表现,导致社会功能活动受损的一组症候群

宁波圣龙王同步带有限公司宁波圣龙王同步带有限公司专业生产

电力招标信息网积极响应《电子招标投标办法》,致力于电力能源化工系统及上下游产业链的招标公告,其中包括但不限于国家电投、国家能源、国家电网、大唐集团、华能、华电集团和地方发电厂的招投标信息,使所有参与者在平台上获取最新的招标投标信息。

北京BGP机房,兆维BGP机房,兆维数据中心,兆维灾备数据中心,兆维灾备机房,兆维电信BGP数据中心,北京双线机房,北京多线机房,

罗田本地招聘信息网站,专注黄冈人才市场,涵盖教师|事业单位|医院护士等多个领域。罗田招聘信息网专注于同城招聘,一键找工作,为您提供最新|最全的求职信息,让求职之路更加便捷。

H5渠道统计,支持App内分享、二维码、网站、海报、Email、短信等App渠道统计,程序化创建渠道链接(二维码)进行海量渠道效果统计。


野外生存建造类游戏手游还是非常多的,在这一个类型的游戏中,玩家就会出现在极端的环境中,然后还可以去创建房子,即使在如今的游戏市场上,有很多类似的游戏,如果大家比较喜欢野外生存建造类的游戏,可以尽情的享受野外生存的刺激,所以下面的这几款游戏真的不应该错过,1、,文明曙光,文明曙光,是一款人们比较喜欢的游戏,在这款游戏中为玩家带来的就是...。

6月16日上午消息,欧洲法院刚刚裁决一起延续了7年的官司,BT种子网站海盗湾直接侵犯版权,此举可能导致欧洲各地的ISP和政府封杀其他BT网站,此前已经导致2003年创办于瑞典的海盗湾遭到封杀和查封,其办公室也被执法人员搜查,3名创始人遭到罚款和监禁,该案的核心在于,海盗湾认为,与Napster等上一代盗版网站不同的是,该网站并没有托管...。

爱奇艺体育原名新英体育是一款专为体育爱好者打造的服务软件,这里不仅能为大家带来国内外热门体育赛事,同时还有多种观看功能可供设置,那么你知道爱奇艺体育在哪清除缓存吗?下面就为大家带来详细教程,...。

情人节降至,百度推出基于AI的魅力值测评和诗歌自动生成主题功能百度搜索在近日推出了基于人工智能技术的,情人节用脸撩,开启桃花运,功能,迎接情人节,用户在百度搜索App中需用语音说一句,开启桃花运,即可进入主题页面,该页面包含两大核心功能,一个是,自拍撩汉,妹指数,,即根据照片颜值打分的功能,另一个则是输入姓名,地点后自动生成专属诗歌的...。

fonmm大神级投影控发表于2023,12,25极米h3s可以手动对焦,具体操作步骤如下,1.打开投影仪并连接到电源,2.将极米h3s投射到屏幕或墙壁上,确保投影图像清晰,3.在遥控器上按下,菜单,键,打开主菜单,4.在主菜单中选择,设置,,然后选择,图像调整,5.在,图像调整,菜单中选择,手动对焦,6.在屏幕或墙壁上找到投影图像...。

发表在投影固件2022,8,813,37本期文章给大家分享极米NEWZ6X的最新固件,V12.15.180,该固件版本更新可解决投影仪在使用过程中的一些操作类问题,想刷机的小伙伴赶紧收藏下来吧,分享不易,大家多多评论哦极米NEWZ6X全网最新固件V12.15.180分享刷机注意事项,请使用格式为FAT32的u盘进行升级,将bin文件强...。

爱的印记·系列钻饰主钻心型爪镶,释放耀眼光芒;别致扭臂之上,心形镶口藏炫目彩宝,真爱是默默的陪伴、如影随形的守候,扭臂造型柔美中气质尽显,层叠错落的花瓣围绕主钻只有你的爱,才能让我心花怒放,心心相吸·情侣对戒最幸福的感受,就是有人惦念;最真实的感动,就是有人心疼,情有冷暖,缘有聚散,惺惺相惜才能永远;爱有浓淡,心有真假,心心相印才有温...。

手机酷狗音乐可以在,我的,点击,本地,即可播放自己手机原本有的歌曲,参考环境,手机型号,OPPOK9,手机系统,Android11,ColorOSV11.1APP版本,酷狗11.6,1.关上手机酷狗后,在点击,我的,——,本地,进入,2.进入之后,这里须要留意的是,须要酷狗准许访问你的文件,才可以找到你手机里的歌曲,3.准许之后,就...。

比亚迪F6DM双模电动汽车名目早在2003年开局立项研发,申报了700多项国际外专利,驳回电动车系统和混合动力系统,这是一种将管理发电机和电动机两种混合力气相联合的先进技术,处置了动力疑问、安保疑问、充电疑问和产业化疑问,这款双模电动汽车经常使用的动力电池是名为,ET—POWER,的铁动力电池,它是比亚迪在电池畛域的最新成绩,铁动力电...。

GlaryUtilitiesPro是一系列系统工具集合,能够修理、加速、增强和保护你的PC机。它允许你清理系统垃圾文件,无效的注册表键值,上网记录等。
声音,声音如何,什么声音,哪些声音,怎么声音

蒙娜丽莎全自动智能抠像系统,PS智能抠图插件,批量自动,很多时候被称之为影楼抠图,适合影楼去用,您可以免费下载。
雷锋网新智造按,合创资本副总裁林恩峰在加入合创团队前,曾是一名创业者——创立过一家通信类企业;也曾是一名深谙技术和市场的管理者——曾历任中兴通讯欧洲区技术总监、国际市场营销部总经理、新加坡分公司董事总经理、澳大利亚分公司董事总经理等职,日前,作为新智造成长榜2017的评委,林恩峰接受了雷锋网新智造的采访,讲述了他的投资逻辑和对人工智能...。

2024年1月25日,三星电子面向中国市场正式推出新一代高端旗舰智能手机三星GalaxyS24系列,包含三星GalaxyS24Ultra、GalaxyS24,以及GalaxyS24三款产品,通过创新的GalaxyAI,三星GalaxyS24系列将AI优势引入智能手机,赋能更轻松的交流与沟通、更高效的生产力、更清晰的影像和更细致的编辑,...。

三度潮起潮落,人工智能技术终于迎来了它的黄金时代,几经沉浮,它不再是远离大众生活的高深理论,也不仅仅是人们茶余饭后作为谈资的人机大战,而是融入到各种产品中为消费者带来了切切实实的便利,为企业创造了真实可见的价值,在这一背景下,雷锋网重磅推出了,AI最佳掘金案例年度评选,,从商业维度出发,寻找人工智能在汽车、金融、医疗、教育、安防、零售...。

4月28日,直屏且首发天玑9300,的vivoX100S,V2359A,出现在GeekBench和安兔兔数据库,天玑9300,,其实就是超大核从3.25GHz涨到3.4GHz↑,其余CPU核心频率不变,GPU频率依然未知,整体提频幅度比前几年小,实际CPU成绩和天玑9300分别不大,注意看,安兔兔测试是从11.8度开跑的,应该是冰箱...。

kknlo高级投影控发表于2018,11,03现在投影仪幕布,市场上大致分成这几个类别,白塑,投影幕布白塑是较普通的PVC材质,做工比较粗糙,表面有纹路,看起来没有白玻纤的清晰哦,只是比白墙效果好一些,白玻纤,投影幕布白玻纤是由特殊效果高清材质制作而成的,会自然伸展平直不需要刻意抚平,投放效果颜色鲜艳,可以增加增益和对比度防潮防霉利于...。
