加速人形机器人发展 NVIDIA宣布扩展微服务库 (加速人形机器人龙头股)
今早,在美国丹佛举行的第51届SIGGRAPH图形大会上,NVIDIA宣布,将为全球领先的机器人制造商、AI模型开发者和软件制造商提供一套服务、模型以及计算平台,以开发、训练和构建下一代人形机器人。
NVIDIA带来了适用于OpenUSD语言、几何体、物理学和材质的生成式AI模型与NIM微服务。这一新服务将加速基于通用场景描述的工作流以及工业数字孪生和机器人的开发。
NVIDIA创始人兼CEO黄仁勋表示,“AI的下一波浪潮是机器人,其中最令人兴奋的发展之一是人形机器人。我们正在推进整个NVIDIA机器人堆栈的发展,面向全球人形机器人开发者和公司开放访问,让他们能够使用最符合其需求的平台、加速库和AI模型。”
值得一提的是,黄仁勋还同Meta创始人兼CEO马克·扎克伯格进行了炉边谈话。二人一同探讨了基础研究如何推动AI突破性进展,以及生成式AI和开源技术如何为开发者和创作者赋能。
将生成式AI引入OpenUSD
在本次大会上,NVIDIA发布了通用场景描述(OpenUSD)的重大成果。据介绍,NVIDIA将扩大这一通用3D数据交换框架在机器人、工业设计和工程领域的应用,提高开发者为AI新一轮发展构建高精度虚拟世界的能力。
本次新推出的内容包括,适用于AI模型的NVIDIA NIM™微服务。
这些微服务可生成回答用户查询的OpenUSD语言、生成OpenUSD Python代码、将材质应用于3D物体、理解3D空间和物理学以帮助加快数字孪生的开发等。
此外,还包括可用于机器人和工业仿真数据格式的全新USD连接器,以及各种开发者工具,用户可通过它们将海量NVIDIA RTX™全光线追踪数据集传输到Apple Vision Pro。
公开资料介绍,NIM全称为Nvidia Inference Microservice,即英伟达推理微服务,是Nvidia AI Enterprise的一部分,可以帮助客户快速部署产品级AI大模型应用。
全球首个用于OpenUSD开发的生成式AI模型也将以NVIDIA NIM微服务的形式提供。借助这些模型,开发者能够将生成式AI copilot和智能体整合到USD工作流中,拓宽3D世界的可能性,帮助加快USD在制造业、汽车行业和机器人等新工业领域的应用。
预览版中的微服务包括:
· USDCodeNIM微服务:回答常识性OpenUSD问题,并基于文本提示自动生成OpenUSD-Python代码,然后将其输入到OpenUSD查看应用程序(例如皮克斯的USDView)或基于NVIDIA Omniverse Kit的应用,以实现相应3D数据的可视化。
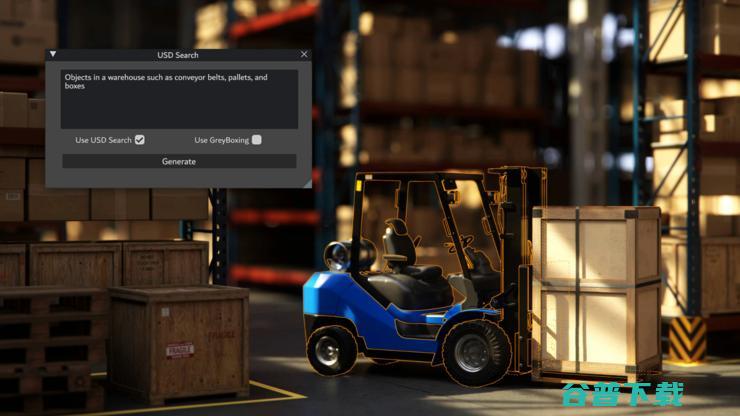
· USDSearchNIM微服务:使开发者能够使用自然语言或图像输入,在海量OpenUSD、3D和图像数据库中进行搜索。
· USDValidateNIM微服务:检查上传文件与OpenUSD发布版本的兼容性,并生成完全由NVIDIA Omniverse Cloud API(应用编程接口)驱动的RTX渲染路径追踪图像。
即将提供的新微服务包括:
· USD Layout NIM微服务:使用户能够基于空间智能,根据一系列文本提示组装出基于OpenUSD的场景。
· USD SmartMaterial NIM微服务:预测并将逼真的材料应用于计算机辅助设计对象。
· fVDBMesh Generation NIM微服务:根据点云数据生成基于OpenUSD的网络,并通过Omniverse Cloud API进行渲染。
· fVDBPhysics Super-ResNIM微服务:对帧或帧序列执行AI超分辨率,生成基于OpenUSD的高分辨率物理仿真。
·fVDB NeRF-XL NIM微服务:使用Omniverse Cloud API在OpenUSD中生成大规模神经辐射场。
加速人 形机器人发展
开发者还可以通过访问新的NVIDIA NIM微服务,用于Isaac Lab和Isaac Sim中的机器人仿真、OSMO机器人云计算编排服务和远程操作数据捕获工作流等。

NIM微服务提供了由NVIDIA推理软件提供支持的预构建容器,使开发者能够将部署时间从数周缩短到几分钟。
机器人专家则将能够通过两项新的AI微服务,在NVIDIA Isaac Sim™(基于NVIDIA Omniverse™平台构建的机器人仿真参考应用)中增强生成式物理AI仿真工作流:
MimicGen NIM微服务可根据Apple Vision Pro等空间计算设备记录的远程操作数据,生成合成运动数据。Robocasa NIM微服务可在OpenUSD(一个用于在3D世界中进行开发和协作的通用框架)中生成机器人任务和仿真就绪环境。
现已推出的NVIDIA OSMO是一项云原生托管服务,允许用户跨分布式计算资源来协调和扩展复杂的机器人开发工作流,无论是在本地还是在云端。
OSMO大大简化了机器人训练和仿真工作流,将部署和开发周期从数月缩短到一周内。用户可以对各种任务进行可视化管理,包括合成数据生成、模型训练、强化学习以及大规模的人形机器人、自主移动机器人和工业机械臂软件在环测试。
同时,NVIDIA还提供了三个计算平台来简化人形机器人的开发,分别是:用于训练模型的NVIDIA AI超级计算机;基于Omniverse构建的NVIDIA Isaac Sim,使机器人可以在仿真世界中学习和完善技能;以及用于运行模型的NVIDIA Jetson™Thor人形机器人计算机。开发者可以根据具体需求来访问和使用全部平台或其中的任何部分。
USD连接器赋能千行百业
多款适用于机器人数据格式和Apple Vision Pro流式传输的全新USD连接器将为更多行业带来OpenUSD互操作性与高级创作能力。
据介绍,当前,为帮助更多使用OpenUSD的工业工作负载,NVIDIA与西门子正在扩大合作,西门子将把OpenUSD流水线与其Simcenter仿真技术组合集成,以支持基于证据的决策和关键利益相关方之间的协作。 这一集成可以实现复杂仿真数据的高保真、实时、逼真可视化,让企业能够更加深入地了解产品在实际操作环境中的性能。为打好基础,西门子还将把Omniverse纳入到其 Teamcenter产品生命周期管理软件组合中。
NVIDIA还发布了一个从统一机器人描述格式(Unified Robotics Description Format)到OpenUSD的连接器,让机器人专家能够将他们的机器人数据无缝导入到用于设计、仿真和强化学习等用途的各种应用中。
除此之外,为了进一步推动OpenUSD生态系统的扩张,NVIDIA发布了OpenUSD Exchange软件开发套件,帮助开发者创建出自己的OpenUSD数据连接器。
新的开发者工具和API可通过NVIDIA Graphics Delivery Network(GDN),将大规模OpenUSD场景从基于Omniverse平台构建的应用流式传输到AppleVisionPro。目前,这些新工具和API提供抢先体验版本。
目前,NVIDIA API目录提供有USD Search、USD Code和USD Validate NIM微服务的预览版,OpenUSD - URDF连接器也已与NVIDIA Isaac Sim™一起提供。
原创文章,未经授权禁止转载。详情见 转载须知 。



hao123音乐包含最全面的音乐网址,最全面的音乐播放器,最权威的音乐榜单,最全面的音乐类型,最全面的音乐歌手。看高清MV、在线收听音乐,就上hao123音乐。

重庆拉卡粒园林绿化有限公司13808399469是为拓展中国花卉市场,促进现代化城市绿化、美化、快速发展而成立的一家私营企业。本公司立足园林绿化工程承包、屋顶花园的建设、花卉种植销售、室内植物的租赁、园林管护等等

4399冒险岛小游戏大全收录了国内外冒险岛类小游戏、冒险岛双人小游戏、冒险岛无敌版小游戏、冒险岛小游戏下载。好玩就拉朋友们一起来玩吧!

沐风网是一家综合性图纸素材平台,提供AutoCAD/Solidworks/ProE/Creo/CATIA/UG/inventor/CAXA/solidedge等图纸的素材下载及免费教程。

上海冰通实业有限公司是一家以工业冷水机、冷冻机为主要产品的产供销一体化企业。

无锡市南方粉末冶金制品有限公司是国内生产粉末冶金制品专业厂家,企业提供的铁基粉末冶金制品、铜基粉末冶金制品以及含油轴承产品,深受广大用户的青睐,咨询电话:0510-85582958,欢迎广大新老用户前来洽谈。

液晶网提供液晶屏,液晶面板,模组,液晶设备,液晶材料,触摸屏,液晶屏参数规格书及液晶行业资讯:市场数据,供求信息,供应商搜索,行业会展,人才招聘等综合服务

安装维修联盟网是一个为消费者与企业搭建的互动平台,总部设立在广州,在全国有31个分部,在全国有3000多个售后服务网点,覆盖了90%的一二线城市、70%的三四线城市。

三旺通信(3onedata)致力于为全球客户提供专业的工业互联网通信解决方案和优质的服务,主营产品囊括工业以太网交换机,工业POE交换机,工业无线AP,工业无线路由器,工业网关,串口服务器,光电转换器,接口转换器等.应用涵盖智慧城市,智能制造,轨道交通,智能电力,综合管廊,煤炭石化等行业.

恒丰铆钉-20年专注开口型抽芯铆钉/封闭型不锈钢抽芯铆钉,拉钉,不锈钢拉钉,单/双鼓型抽芯铆钉,内锁/外锁型拉丝铆钉,灯笼铆钉,海马钉研制,能生产ISO,IFI,DIN及非标抽芯铆钉,ISO/TS16949厂家,恒丰铆钉咨询热线:400-806-1136

探索科学、寓教于乐的学习平台。在这里,您将与我们的科普机器人一起探索神秘的科学世界。

广州乌谷科技有限公司主要生产静音房、隔音房、静音舱、隔音舱、洽谈室、琴音房、星空房、会客室、会议室、电话亭、直播间、宠物房、OEM定制等系列产品。


在探讨2024年近视眼加盟领域的品牌时,易视界品牌无疑是一个值得深入了解的选择,以下是对易视界品牌的详细分析,一、品牌概述易视界是一家从事青少年近视防护、弱视训练的全国性眼健康服务机构,自创立以来,易视界始终致力于帮助青少年改善视力问题,并提供全面的眼健康服务,二、品牌优势技术实力,易视界拥有多项高新技术,其中,多功能近视弱视增视仪,...。

易视界品牌在近视矫正加盟领域具有较高的认可度和影响力,以下是对该品牌的详细分析,一、品牌概述易视界是一家从事青少年近视防护、弱视训练等视力健康服务,是一家集研发、生产、培训、销售于一体的综合性公司,其核心技术产品,多功能近视弱视增视仪,体现了品牌在技术研发方面的实力,二、品牌优势技术成熟完善,易视界拥有自主研发的核心技术和先进的视力矫...。

随着人们生活节奏的加快和电子产品使用频率的增加,近视已经成为了一个普遍现象,面对庞大的市场需求,,易视界,作为一家专注于视力健康领域的大品牌,在2024年推出了其新的近视矫正加盟计划,旨在用先进的技术与服务帮助更多人改善视力问题,品牌介绍,易视界,自成立以来就致力于研究和发展各种个性化的近视矫正方法和技术,经过多年的努力与发展,,易视...。
在探讨2024年近视眼加盟领域的品牌排行时,易视界品牌无疑是一个值得深入了解和考虑的选项,以下是对该品牌以及近视眼加盟领域别的品牌的排行和分析,易视界品牌分析品牌影响力,易视界作为全国连锁性眼健康综合服务机构,在视力保健和视力防护领域具有较高的认可度和美誉度,其品牌在市场上赢得了广泛认可,为加盟商提供了稳定的客流基础和信任,技术实力,...。

在探讨2024年近视眼加盟领域的品牌时,易视界品牌无疑是一个值得深入了解的选择,以下是对易视界品牌的详细分析,一、品牌概述易视界是一家从事青少年近视防护、弱视训练的全国性眼健康服务机构,自创立以来,易视界始终致力于帮助青少年改善视力问题,并提供全面的眼健康服务,二、品牌优势技术实力,易视界拥有多项高新技术,其中,多功能近视弱视增视仪,...。

在探讨2024年近视眼加盟领域的大品牌时,易视界确实是一个值得推荐的好品牌,以下是对该品牌的详细分析,易视界品牌推荐理由品牌背景,易视界是一家专注于青少年视力矫正的品牌,拥有多年的视力保健和视力矫正经验,其成熟完善的技术团队和先进的设备,为青少年提供了个性化的视力矫正方案,技术优势,易视界采用先进的视力矫正技术,如物理疗法、视觉训练等...。

因为外观,耐用性,性能,屏幕,外放,摄像头等各个维度,都非常适合校园和职场用户,惠普星BookPro系列向来是各种笔记本榜单中的常客,它在今年双十一期间,甚至一度全网卖断货,而接下来的双十二,叠加2024年国补末班车的影响,预计到时还会有好价,我们这次就和大家看看,为什么大家会推荐英特尔Evo™版的惠普星BookPro14AI轻薄战力...。

因为外观,耐用性,性能,屏幕,外放,摄像头等各个维度,都非常适合校园和职场用户,惠普星BookPro系列向来是各种笔记本榜单中的常客,它在今年双十一期间,甚至一度全网卖断货,而接下来的双十二,叠加2024年国补末班车的影响,预计到时还会有好价,我们这次就和大家看看,为什么大家会推荐英特尔Evo™版的惠普星BookPro14AI轻薄战力...。

之前传闻REDMITurbo4和一加Ace5,Ace5Pro都是12月底发布,而12月13日,REDMI总经理王腾在微博互动中表示,计划有变,,而小米王化也表示,别圈我了,我早就暗示了本月没有发布会了,同日,闲聊站也表示延期了,但,不会变太多,这波,REDMITurbo4要从2024年的新机,变成2025年的新机了,RedmiT...。

之前传闻REDMITurbo4和一加Ace5,Ace5Pro都是12月底发布,而12月13日,REDMI总经理王腾在微博互动中表示,计划有变,,而小米王化也表示,别圈我了,我早就暗示了本月没有发布会了,同日,闲聊站也表示延期了,但,不会变太多,这波,REDMITurbo4要从2024年的新机,变成2025年的新机了,RedmiT...。

在电子游戏领域中,异形系列因其独特的科幻背景和紧张刺激的游戏体验而深受玩家喜爱,无论是对异形电影系列的忠实粉丝,还是寻求新奇游戏体验的玩家,异形系列游戏都提供了丰富多样的选择,以下是2024年几款值得推荐的异形系列游戏,它们不仅忠于原作的精髓,更在游戏性上进行了创新,为玩家带来全新的挑战与乐趣,1.异形,隔离,alien,isolat...。

2024年的火柴人打斗游戏以它们独特的艺术风格、丰富的游戏模式和激烈的战斗体验吸引了大量玩家的喜爱,以下是几款在2024年特别受欢迎的火柴人游戏,这些游戏不仅为玩家提供了极佳的游戏体验,还展示了火柴人游戏的新趋势,1.火柴人传奇,复仇之路这款游戏以其独特的故事情节和创新的战斗系统脱颖而出,玩家将扮演一名火柴人英雄,在一系列精心设计的任...。

地方特色美食不仅在口味上非常贴合大众的饮食习惯,在美食的价格上也是很多人的追求,因为其价格相对较为亲民,这使得很多地方的美食小吃的消费市场,一跃成为了每个城市中颇为引人眼球的风情线之一,市场的畅销为地方性美食小吃带来了很多加盟商,昔乡记湖南米粉传统的饮食口味,独特的地方风味使得该品牌在如今的小吃行业中,独领风骚,飞速发展,那么想要开一...。
雷锋网消息,2018年5月15日,中国开源云计算公司EasyStack在北京举行召开了春季发布会,正式发布公司中文品牌名——易捷行云,同时宣布完成3亿元C,轮融资,EasyStack表示,本轮融资将主要应用于核心技术的研发、云计算产品化的开发,以及企业解决方案的生态投入三大方向,融资完成后,易捷行云将在年内拆除VIE架构,未来或将在国...。

语音播放文章内容由深声科技提供技术支持您的浏览器不支持audio元素,2019年行将结束,AI落地之路究竟走了多远,AI商用落地成绩单近日,在2019年厦门新经济发展大会的,新技术——浅谈AI商用落地成绩单,主题论坛环节,包括美图创始人兼CEO吴欣鸿、云知声董事长兼CTO梁家恩在内的业界人物就AI商用落地的成绩和现状进行了深入的探讨,...。

每年参与报考教师资格证的人数不降反增,令教师资格证的成为各类资格证书的中的香饽饽,考取难度与竞争压力也越来越大,北京育致远教育是专注于教师资格教育的品牌,它凭借着强大的师资力量以及自主研发的科学教材,给学子们送去的教学享受,那以此来看,北京育致远教育怎么样,可随着小编一起来了解下,北京育致远教育是一个怎样的品牌,其实,对于北京育之缘教...。
下载地址,类型,安卓游戏,角色表演版本,v1.0大小,0KB言语,中文平台,安卓APK介绍星级,评分,★★★★★游戏标签,克罗诺斯时代rpg手游克罗诺斯时代手游是一款mmorpg手游,这款作品基于丰盛的设定而开发,有着粗劣细腻的画面,游戏人物设计美丽,声优阵容弱小,欢迎感兴味的玩家来下载试玩,克罗诺斯时代官方引见,克罗诺斯时代,Ch...。
