对话武汉大学李淼教授 以大模型视角看待一切机器人问题丨GAIR live (武汉大学采访)
“人们对机器人的抓取和操作存在很多误解,很多研究成果很难推进到实际应用环节。”
武汉大学李淼教授介绍,这是他放弃前往麻省理工 MCube Lab(操纵与机制实验室)Alberto Rodriguez教授团队做博士后研究,选择回国创业的重要原因。
李淼教授博士毕业于瑞士洛桑联邦理工学院,师从学习算法与系统实验室的创办者Aude Billard教授,长期致力于机器人学习和控制、物体抓取和操作等领域的研究。
他关于动态抓取算法研究的博士论文,在瑞士洛桑联邦理工学院获得了全球每两年仅一名的瑞士ABB奖(Asea Brown Boveri Ltd. ),也是该奖的唯一华人获得者。这项研究提出了复杂物体灵巧操作的鲁棒性算法以及成功应用于现实世界的机器人操作问题,尤其在机器人抓取、操作方面。
李淼教授回国后依然延续了这项研究,为抓取算法寻找合适的落地场景。
大模型技术出现后,李淼教授的研究内容也随之变化,一方面与业界合作,将大模型技术应用在家庭服务机器人的产品研发上;
另一方面,在学术研究上,也开始尝试将扩散模型(Diffusion Policy)和手术机器人动作生产策略相结合、将大模型和医疗影像相结合。
“我在与团队成员交流时一直强调,我们要以大模型的视角来看待一切机器人的问题,无论是算法研究还是其他各类工作,如果和大模型不相关,也许5年之内就会被淘汰。”
李淼教授指出,大模型将彻底改变机器人领域的发展进程。
4月8日(周一)20:00-22:00,将举办主题为「大模型时代,机器人的技术革新与场景落地」的线上圆桌论坛,届时李淼教授将分享更多前沿观察。
以下为对话(经编辑):
01 从理论研究到机器人研究
:硕士毕业后,您为什么选择了瑞士洛桑联邦理工学院读博?该校的机器人研究有何特色?
李淼: 我最开始是在华中科技大学申请的直博,硕士阶段结束后,考虑到当时国外的机器人研究比较领先,所以尝试申请了国际上机器人专业排名最高的几个学校,也拿到了很多offer,比如美国的约翰·霍普金斯大学、英国的帝国理工大学等等。
我希望选择一个与AI算法结合更紧密的方向,所以最终去了瑞士洛桑联邦理工学院Aude Billard教授的学习算法与系统实验室(Learning algorithms and systems Laboratory)。
由于我本科、硕士阶段的机器人研究方向更加偏向理论,和数学、医学、动力学等学科的相关性很高,而Aude Billard教授团队的研究则更加注重数据,通过模仿学习等手段收集机器人工作过程中的数据并进行分析,Aude Billard教授是这一领域的开创者,也是瑞士机器人专题网络负责人。
除Aude Billard教授的实验室之外,瑞士洛桑联邦理工学院还有很多技术领先的机器人研究团队,如研究仿生机器人的生物机器人实验室(Biorobotics Laboratory)、发明了折纸机器人的可重构机器人实验室(Reconfigurable Robotics Lab)等等。
瑞士洛桑联邦理工学院机器人研究的整体风格就是小而精,学校拓展了非常多具体的研究方向和团队。
:工业机器人四大家族之一的ABB也诞生于瑞士,您多次提名和获得该校的ABB奖,这对您后来的创业方向有什么影响?
李淼: ABB的总部在瑞士,与瑞士洛桑联邦理工学院有很多合作,ABB在学校里设立了的一个奖项(Asea Brown Boveri Ltd. ),每两年颁布一次,奖励奖励能源、自动化、电信等各个领域的原创科学工作,每次只有一个获奖名额,竞争非常激烈。
我凭借研发的复杂物体灵巧操作的鲁棒性算法以及成功应用于现实世界的机器人操作问题获得了2018年的奖项(论文:《Dynamic Grasp Adaptation -- From Humans To Robots》),同时我也是唯一的华人获得者。
以往的机器人研究中开发了大量的算法,但是并不能很好地解决实际问题,而我的这项研究第一次成功地应用于现实世界的机器人操作问题,尤其在机器人抓取、操作方面。
2016年我离开瑞士洛桑联邦理工学院后之后,发觉在机器人领域的很多研究成果仍旧很难推进到实际应用环节,人们对机器人的抓取和操作存在很多误解,所以我决定回国创办一家公司,将机器人技术推广到实际应用场景之中。
我回国后的创业团队依旧延续了对这项技术的探索,将其应用在物流、药房等场景的抓取、操作中,不断打磨解决方案。
:2016年您回国创业,从事机器人抓取与智能控制相关应用的研究。为什么决定回国创业?
李淼: 最开始回来时我还是一个fresh PHD,对行业的认知还有限,尝试为抓取的算法找到合适的落地场景,从物流、工业到医疗场景都进行了落地尝试,最后聚焦到医疗场景。
这时候我们发现,一个机器人产品不仅仅需要有抓取技术,还需要有很多辅助的硬件设配相配合,慢慢就形成了综合的解决方案。
2017年我来到武汉大学工作后,前期的这些工作也间接影响了我在学校里的研究方向,使我更加关注机器人的落地应用。
:早在2022年,您与港中文的陈翡教授就合作发表过一篇烹饪机器人的论文《Robot Cooking With Stir-Fry: Bimanual Non-PrehensileManipulation of Semi-Fluid Objects》,这篇论文的关注角度与孙宇教授此前发布在IJAIRR期刊上的《 Consolidating Trees of Robotic Plans Generated Using Large Language Models to Improve Reliability》一文有哪些不同?您认为在烹饪场景中机器人技术还有哪些值得探索的方向?
李淼: 在厨房这个场景中,对机器人的要求是最综合的,不论是精细的运动,还是更高维度的规划,以及对不同模块的理解,烹饪场景都是最丰富的。
甚至在其他场景中鲜少用到的味觉和嗅觉,烹饪场景中也有涉及。
机器人在烹饪场景的工作可以分为两个大的逻辑,一是上层的任务规划,二是底层的动作规划。我和陈翡教授的合作更多是动作层面的规划,孙宇教授的研究则是关于任务层面的规划。
要将上层的任务规划和底层的动作规划打通,还需要一个中间层 middle layer,也可以叫做胶水层。
在当前的研究领域,针对中间层架构的深入探究尚未达到预期的成熟度。
无论是采用规划领域定义语言(Planning Domain Definition Language, PDDL)以形式化地描述和连接自动化规划任务,还是依赖于基于规则的专家系统进行决策支持,亦或是利用神经网络构建的专家系统,这些方法在实现高效、可靠的中间层处理能力方面均显示出了一定的局限性。
这些技术在处理动态变化的环境、提升决策的透明度和解释性、以及增强系统的泛化能力等方面仍面临诸多挑战。
:在您对机器人领域的研究中,也融合了机器视觉、深度学习等不同学科知识,如何看待机器人研究中跨学科合作的意义?
李淼: 机器人研究可以大体分为四块:设计(具身)、感知、规划、控制。
我们从感知的角度来看,当机器人需要获取视觉信息时,就需要视觉传感器的配合;机器人需要获取触觉信息时,就需要触觉传感器的配合,看起来似乎是多学科交叉融合的研究。
但是我们从当下大模型的视角或数据驱动的视角来看,这些东西本身就是一体的。
不论是具身层面还是感知层面,机器人都是多模态的。机器人的外观既可以是人形,也可以是狗形;机器人的获取的信息既可以是视觉信息,也可以是触觉信息。我们可以将这些内容都看作是机器人研究的一部分。
:大模型技术的出现为机器人研究带来了巨大的影响。在您的研究中对这项技术进行了哪些应用?
李淼: 在我和业界的合作中,已经开始尝试将大模型技术应用在家庭服务机器人的研发上。
以扫地机为例,在扫地机的感知中,我们利用大模型进行数据生成,合成仿真数据以提升真实数据的不足;同时又将逻辑推理融入感知中,基于本身的语义地图,,让扫地机更智能地进行运动判断,避免线材、杂物等障碍物的干扰 ;
在清扫报告部分,我们利用大模型生成清扫报告, 同时允许用户进行报告中内容的自定义选项添加,从而更全面的了解家庭情况。
在学校的研究里我们还没有用到真实的大模型,但是也已经开始向这方面的研究靠近,比如扩散模型(Diffusion Policy)和手术机器人动作生产策略相结合、大模型和医疗影像的结合等等。
我在与团队成员交流时,一直强调我们要以大模型的视角来看待一切机器人的问题,无论是算法研究还是其他各类工作,如果和大模型不相关,也许5年之内就会被淘汰。
以前我们做的那些工作,现在从大模型的视角来看,所设计的模块一定要足够大,将其建成“data in、>
4月8日,北京时间20:00-22:00,将举办主题为「大模型时代,机器人的技术革新与场景落地」的线上圆桌论坛。
本次论坛嘉宾有,南佛罗里达大学孙宇教授、武汉大学李淼教授、南方科技大学张巍教授、优必选科技庞建新博士。
“全球人工智能与机器人大会”(GAIR)始于2016年与中国计算机学会(CCF)合作创立的 CCF-GAIR 大会,旨在打造人工智能浪潮下,连接学术界、产业界、投资界的新平台,而“连接三界”的全新定位也在此大会上得以确立。
经过几年发展,GAIR大会已成为行业标杆,是目前为止粤港澳大湾区人工智能领域规模最大、规格最高、跨界最广的学术、工业和投资领域盛会。
GAIR Live 作为旗下视频直播品牌,旨在输出新鲜、深度、原创的大咖访谈与对话内容,打造辐射产、学、研、投的特色线上平台。
大模型与机器人相关资料
1.《对话南佛罗里达大学孙宇教授:当大语言模型用于机器人任务规划丨IJAIRR》
2.论文:Consolidating Trees of Robotic Plans Generated Using Large Language Models to Improve Reliability
《国际人工智能与机器人研究期刊》(International Journal of Artificial Intelligence and Robotics Research,简称IJAIRR),是由新加坡GAIR研究院与世界科技出版社联合出版的国际学术期刊。
作为全球首本专注于人工智能(AI)、机器人技术(Robotics)以及基础科学交叉研究(Research)的期刊,IJAIRR致力于成为AI与机器人领域研究的权威发布平台。
如果您在本领域顶级会议上发表的文章(或即将发表)不超过一年,我们将协助您稍作修改后在IJAIRR期刊上发表。
如果您领导的团队在顶级会议上有多篇论文发表,并希望在IJAIRR上围绕特定主题策划一个专题(Special Issue),我们诚挚邀请您深入讨论合作事宜。
如果您是顶级会议的组织者,并有意与IJAIRR合作,针对特定会议策划一个专题(Special Issue),我们也期待与您具体商讨合作细节。
IJAIRR期待与您携手,共同推动人工智能与机器人研究的发展。图片
联系人:IJAIRR创刊主编朱晓蕊博士,xiaorui_zhu@gair.sg
关于期刊创刊主编等更多信息,可点击

关于、GAIR大会、GAIR研究院(期刊和在线社区)的详细介绍,请阅读朱晓蕊教授的专访:
IJAIRR期刊的主页链接为:
原创文章,未经授权禁止转载。详情见 转载须知 。


婚姻家庭律师网汇集全国知名婚姻律师和婚姻律师事务所,专业提供婚姻律师在线咨询和电话咨询服务,专业婚姻律师,知名婚姻家庭律师,婚姻纠纷律师,婚姻继承律师,婚姻案律师,婚姻财产律师,婚姻诉讼律师为您解答相关法律疑问,费用与收费标准公开透明.

湖南八喜广告制作有限公司是长沙集活动策划,广告设计制作、标识标牌、活动展览于一体的广告公司。公司主要经营范围为:长沙活动设计执行,庆典活动策划,团建活动执行,喷绘写真制作,形象墙制作,科室牌制作,舞台音响租赁,led显示屏租赁,招牌制作,发光字制作等,公司团队有多年实践经验,以高效的执行力,卓越的服务,帮助企业实现线上线下的营销目的。

上海桌椅租赁公司,联系电话13818073616,专业提供家具租赁,桌椅租赁,会展家具租赁,沙发,桌子,椅子租赁,会议桌椅,办公家具出租,凳子,折叠桌,折叠椅租借,上海灯光音响租赁一站式服务配套体系。。

驰兔专注工位器具-北京金盛宏昌货架有限公司主要以批发定制为主,主要服务产品有工具挂板、工具架、工具柜、工具车、工作台、仓储货架,欢迎企业前来订购咨询

立志做全球最大的IPA分享网站,提供在线iOS应用下载服务,为您搜集最全、最专业的iPhone,iPad,iPod软件与IPA文件,支持iOS4,iOS5,iOS6软件,iOS7软件,iOS8,iOS9软件在线安装以及IPA文件下载。

广西南宁善艺星文化传播有限公司是一家致力于文化艺术传播产业的综合性专业机构,集合强大的创意及制作班底以及专业的市场推广,有四通八达的传播渠道。

筋斗云专注于提供香港服务器、美国服务器、高防服务器、站群服务器、G口万兆大带宽服务器等香港服务器租用业务,选美国服务器租赁及网络安全领域找筋斗云。

无忧精英是前程无忧旗下为年薪10万+的精英,打造的全新职业发展平台。为求职者提供大量精选的高薪热招职位,金牌猎头推荐,精准识别名片。为职场人提供猎头在线服务,拓展商务社交人脉,实现找工作和商务交流合作。

一九文学网提供2025精选散文、感人的爱情故事、伤感个性签名、QQ空间日志、名人故事、祝福语短信、心情随笔等文章免费在线阅读,!

广州市秀真茗志广告有限公司旗下谷稻森摄影拥有一支创意、热情、敬业的队伍,凭严谨的拍摄态度专业的摄影技术及创新的拍摄理念,将为客户提供高品质的摄影服务。我们可以为食品企业、酒店、高档会所、中西餐厅制定详细的摄影计划及拍摄方案。

威海市沿海网络科技有限公司


大家好,今天为大家带来几款休闲的开心农场游戏,游戏玩法简单,通过养殖自己的各种小动物来获利,整个游戏过程休闲又娱乐,而且可爱的卡通画面和舒缓的音乐还给每一个玩家带来舒适感,玩家在这里不仅需要经营自己的农场,也需要通过运营来使自己的利益达到最大化,这还需要玩家的一点运营和理财能力,通过这几款农场游戏,玩家还能感受农夫的日常生活,1、,卡...。
要闻提示1.manner被曝聘用聋哑咖啡师,网友表示至少去年11月就是无声咖啡师2.董明珠格力股东大会发声,小米,空调第一,不实,称小米全靠别的厂家做产品3.东方甄选被曝收取七位数宣传费,旗下主播称贵州地貌,山河破碎,,贵州文旅已删除东方甄选相关视频4.余承东西北工业大学演讲全文,县理科第一名、华为留着不让走,性格内敛,被逼到了管理层...。

发表在专业问答2023,8,214,03展示机型信息,品牌型号,明基i707系统版本,DOS系统明基投影仪调节画面大小可以通过变焦环、梯形校正功能和移动设备来调整画面,总共可以分为三步,下面为明基投影仪怎么调节画面大小的详细步骤做具体说明,明基投影仪怎么调节画面大小1、变焦调节通过明基投影仪镜头的变焦功能进行缩放画面大小,调节镜头顶部...。

一、需要进行厂家的评估审查二、与公司进行深入的联系,了解所谓的商品三、签定加盟协议书,要成为商家的合作伙伴,四、培训厂家的企业文化、宣传技巧,五、确定一定的经营场所,六、制定营销方案,七、正式营业积极作好产品服务工作,及时掌握商品的一系列信息,市场的占有率还是非常多的,这里面的效益还是非常大的,随着人们生活水平的不断提高,财富的越来越...。
你听说了吗?阿里云全线降价20%,还上了热搜,2024年一开年,看来阿里云杀红了眼,云市场即将变天,现在续费的阿里云主机,续费三年和续费两年的价钱差不多,那肯定续费三年呀,当然买新的更便宜,现在新老用户同享了,尤其是第三次降价,直接上了热搜,服务器打1折,这让轻量主机、虚拟机瞬间失色,看来阿里云就又让云市场卷起来了,阿里云上热搜了,...。

男儿本性,十分不错!片名,男儿本性,InvisibleTarget·出品人,宋岱林小明赵雪英于冬·导演,监制,陈木胜·编剧,陈木胜吕思琳凌志民·主演,谢霆锋余文乐房祖名吴京江若琳安志杰·出品,银都机构有限公司寰宇文娱有限公司保利博纳电影发行有限公司广州市英明文明流传有限公司·发行,保利博纳电影发行有限公司·影片类型,警匪举措·上映...。

丰田有丰田MR2、CEL03、丰田86、丰田赛利卡跑车还有丰田Supra跑车,跑车的属于一种低底盘、线条流利、能源突出的汽车类型,其最大特点是不时谋求速度极限,跑车的分类有很多种,按车身结构可分为轿跑、敞篷跑车、双门跑车,按价值可分为平民跑车、超级跑车,在中国,丰田雷同基于,经过汽车,发明富有社会,这一企业理念,在致力为顾客提供高品质...。

要是问如今哪个级别的SUV最火,答案必需是紧凑型,它们的尺寸和多少钱很适宜家用,日常家用再适宜不过了,因此这类车型的市场保有量很大,作为三菱旗下车型中的一员,劲炫ASX2020款新劲炫2.0LCVT生机版是不少生产者想购置的车型,上方小编就为大家繁难引见一下这款车,再算算买它须要多少钱吧,接上去看下性能,劲炫ASX装备了主,副驾安保气...。
新华社深圳6月30日电题,震撼!超级工程深中通道正式通车新华社记者叶昊鸣、田建川从昔日,叹零丁,,到今天,跨伶仃,,这是一个时代的见证,30日,举世注目标超级工程——深中通道,正式通车试经营,这是环球首个集,桥、岛、隧、水下互通,为一体的跨海集群工程,路途全长约24公里,深圳至中山的车程将从此前约2小时缩短至30分钟,历时141天成功...。

我以为以上三个追剧软件都是无偿经常使用的,无需会员即可享用高清、无广告的观影体验,当然,这些软件中有些或者须要您手动搜查能力找到您想看的剧集,收费追韩剧最全的软件我以为比拟出名收费追韩剧软件有,韩剧大全,、,追剧影视大全,、,爱追剧,、,蜂鸟追剧,、,多多追剧,、,熊猫追剧,、,夜猫追剧,、,追剧兔视频投屏,和,干饭时辰追剧,等,追剧...。

这一套不是网上泛滥的那一套版本你可以去用那些泛滥的版本问题一大堆又用不了又浪费时间这一套修复了很多东西清理了后门完美运营版本2023.08.25更新已更新效果更好更稳定

在大家喜欢玩的小游戏中,由于对手机的内存要求并不高,所以受欢迎程度也是很高的,每个玩家在手机上都可下载几款,那么不断合成的小游戏有没有呢,接下来为您介绍一下相关的内容,无论是你在游戏中可以看到各种恐龙的还是其他动物植物的,都融入了大家熟悉的合成玩法,这款满足需求的通过合成霸王龙的方式,可让您有机会在pvp战场当中展开激烈的竞技,彼此之...。

10多年的苦读,几天的轮番考试,这是高考给人的主要印象,但这实际上却是,简单的,,因为高考的路径就在那里,你所需要的只是前进,相比之下,高考志愿反而要,难不少,,你需要根据往期的分数去估算录取概率,你需要通过第三方资料评估学校、专业的实力,你甚至需要思考规划自己未来30年的人生,这也让高考志愿实际成为了整个高考过程中的,第二道跨栏,,...。

科大讯飞AI影响因子活动科大讯飞高校合作科大讯飞携手北师大办AI,教育峰会AI,教育是科大讯飞很重视的一条业务线,今天,科大讯飞又有了新的举措,7月21,22日,科大讯飞将与北京师范大学合作举办A.I.•大数据共创教育美好未来——全球人工智能与教育大数据峰会•2018,,在大会前一天,特意召开了媒体见面会,据雷锋网了解,科大讯飞与北京...。
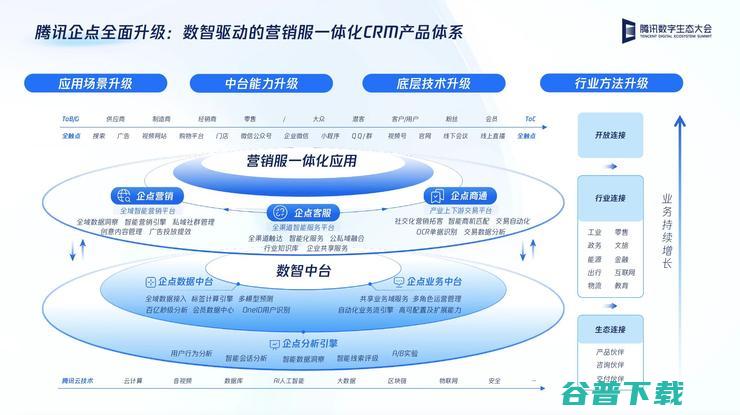
12月1日,在2022腾讯全球数字生态大会腾讯企点专场上,腾讯企点升级推出数智驱动的营销服一体化CRM产品体系,为企业的业务创新和持续增长提供源源不断的动力,进一步助力企业在营销、服务、交易等关键环节提质增效,加速企业数字化升级,腾讯高级执行副总裁、云与智慧产业事业群CEO汤道生表示,数字化经济快速发展,企业也越来越关注如何更有效触达...。

10月23日,阿里巴巴集团天猫精灵及旗下高端品牌哇哦举行新品发布会,推出哇哦闺蜜机智臻版、哇哦闺蜜机智享版、哇哦闺蜜机智享版周深定制版、天猫精灵IN糖6电池版、天猫精灵IN糖6电池版周深礼盒版、天猫精灵X6周深礼盒版蓝沙色六大新品,其中,哇哦闺蜜机智享版凭借100Hz高刷屏,以及2799元的普惠价格赢得广泛关注,本次发布会以,智臻智享...。
