3 Mars说光场
雷锋网按:光场技术是目前最受追捧的下一代显示技术,谷歌、Facebook、Magic Leap等国内外大公司都在大力布局。然而目前国内对光场(Light Field)技术的中文介绍十分匮乏,曹煊博士《Mars说光场》系列文章旨在对光场技术及其应用的科普介绍。
曹煊博士系腾讯优图实验室高级研究员。优图— 腾讯旗下顶级的机器学习研发团队,专注于图像处理、模式识别、深度学习。在人脸识别、图像识别、医疗AI、OCR、哼唱识别、语音合成等领域都积累了领先的技术水平和完整解决方案。
《Mars说光场》系列文章目前已有5篇,包括:《Mars说光场(1)—为何巨头纷纷布局光场技术》、《Mars说光场(2)— 光场与人眼立体成像机理》、《Mars说光场(3)— 光场采集》、《Mars说光场(4)— 光场显示》、《Mars说光场(5)— 光场在三维人脸建模中的应用》,雷锋网经授权发布。
【摘要】 — 光场显示能在视觉上完全重现真实世界,但在显示光场以前首先要采集光场,否则将会是“巧妇难为无米之炊”。传统相机拍摄的2D图片不能用于光场显示[1],因此需要专业的光场采集设备。相关研究者已经建立了一系列光场采集的理论[2],并在光场采集技术的发展过程中出现了多种设计方案,受到广泛关注和研究的主要有三种设计思路:(1)基于微透镜阵列(Microlens Array)的光场采集;(2)基于相机阵列(Camera Array)的光场采集[3];(3)基于编码掩膜(Coded Mask)[4]的光场采集。
1、基于微透镜阵列的光场采集
基于微透镜阵列的光场采集最早可以追溯到1908年Lippmann提出的集成成像(Integral photography)[5],集成成像为基于微透镜阵列的光场采集奠定了重要的理论基础。关于集成成像的发展历史,可以参考Roberts在2003年的详细梳理[6]。基于集成成像理论,MIT的Adelson在1992年尝试采用微透镜阵列来制造光场相机[7],斯坦福Levoy将集成成像应用于显微镜,实现了光场显微镜[8]。
基于透镜阵列的光场采集主要依靠在成像传感器与主镜头之间加入一片微透镜阵列,物体表面光线首先经过主镜头,然后经过微透镜,最后到达成像传感器(e.g. CCD/CMOS)。如图1所示,物体表面A点在FOP角度范围内发出的光线进入相机主镜头并聚焦于微透镜,微透镜将光线分成4x4束,并被成像传感器上对应的16个像素记录。类似的,空间中其它发光点,例如B点和C点,在其FOP角度范围内的光线都被分成4x4束并被分别记录。
微透镜阵列的主要作用是将物体表面同一点在一定角度范围内的各个方向发出光线进行离散化解耦,图1中的微透镜将光线离散化为4x4束,离散化程度由微透镜光学参数、主透镜光学参数及微透镜与成像传感器之间的距离等多方面因素决定。
参照光场4D模型,微透镜阵列好比(s, t)平面,成像传感器好比(u, v)平面。在基于微透镜阵列的光场采集模型中,(s, t)平面微透镜的数量决定了光场的图像分辨率。(u, v)平面像素数量决定了能采集光线的总数量,(u, v)平面像素总量与(s, t)平面微透镜数量的比值即为光场角度分辨率,也即采集视点个数。
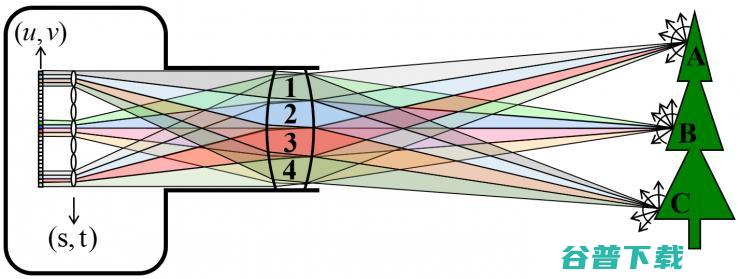
图 1. 基于微透镜阵列的光场采集原理示意图
基于微透镜阵列的光场采集具有体积小,单次拍摄成像等优点。但也存在两个明显的缺陷,一方面是单视点的图像分辨率损失严重[9],例如使用4K(4096*2160)的图像传感器采集4x4视点的光场,则图像分辨率在水平方向和垂直方向都降低到原分辨率的四分之一,既单个视点图像分辨率只有1024*540。另一方面是采集光场的FOP角度较小,也即视差较小,只能在较小的角度范围内变换视点。
尽管存在上述的缺点,但由于总体成本在可控范围内,基于微透镜的光场采集方案是商业化光场相机主要采用的方案。目前已经商业化的光场相机主要包括美国的Lytro和德国的Raytrix。Lytro是一款基于微透镜阵列的手持光场相机,由斯坦福大学Ren Ng(Marc Levoy的博士生)在2005年提出 [10,11],并分别于2011年和2014年正式向市场推出第一代和第二代手持式光场相机Lytro[12]。相比传统相机,Lytro的关键设计是在传统相机中嵌入一块微透镜阵列,如图2所示。物体发出的光线被主透镜聚焦在微透镜阵列平面,微透镜阵列将光线分开并被图像传感器分别记录下来,从而同时记录了不同方向上光线的强度。
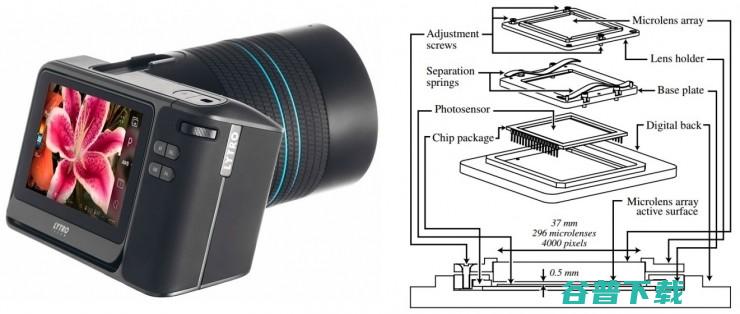
图 2. 美国Lytro基于微透镜阵列的光场相机
Raytrix [13]是德国一家创业公司,同样是基于微透镜阵列的便携式光场相机[14]。Lytro主要面向大众普通用户,而Raytrix不仅面向普通用户还面向工业和科研应用领域,如图3所示。Raytrix扩大了采集光场的深度范围[15]并开发了一套自动标定算法用于标定光场相机[16]。
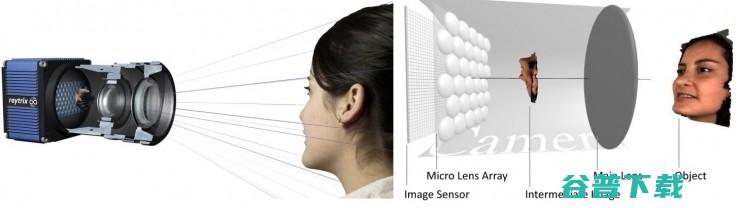
图 3. 德国Raytrix基于微透镜阵列的光场相机
Adobe Systems Inc. 的Todor Georgeiv在2006年研究了视点分辨率与角度分辨率之间的互相平衡关系[17],在2008年提出了一种统一的光场相机仿射光路理论[18]并提高光场分辨率[19],基于该理论框架构造的光场相机如图4所示。严格来说,Todor Georgeiv提出的光场相机与上述Lytro和Raytrix的基于微透镜阵列的光场相机并不完全相同。图4中透镜阵列更靠近相机主透镜位置,解耦合后的光线在成像传感器上形成的图像与Lytro或Raytrix并不相同,因此从成像传感器原始数据提取光场的算法也与Lytro和Raytrix不同。

图 4. 美国Adobe Systems Inc.光场相机
2、基于相机阵列的光场采集
基于相机阵列的光场采集不需要对相机进行改造,但需要增加相机的数量。光线从物体表面发出,分别进入多个相机镜头,并分别被对应的成像传感器记录。如图5所示为4x4相机阵列,A点在半球范围内发出各向异性的光线,其中FOP角度范围内的光线进入了相机阵列,并被分成4x4束光线,每束光线被对应的镜头聚焦在成像传感器上,由此A点各向异性的光线被离散化为4x4束并被分别记录。
对比图1中基于微透镜的光场采集方案,相机阵列通过多个镜头将物体表面同一点在一定角度内各向异性的光线解耦和,并离散为多束光线分别记录。解耦和后的离散化程度由相机阵列的规模决定。相机数量越多,离散化程度越高。
参照光场4D模型,图5中镜头阵列好比(s, t)平面,成像传感器阵列好比(u, v)平面。(s, t)平面镜头的数量,也即相机的数量,决定了光场视点个数。(u, v)平面所有像素数量决定了能采集光线的总数量。(u, v)平面像素总量与(s, t)平面镜头数量的比值即为单个视点分辨率。一般而言,相机阵列中各个相机成像传感器的分辨率一致,所以单个相机成像传感器的分辨率即为光场视点分辨率。
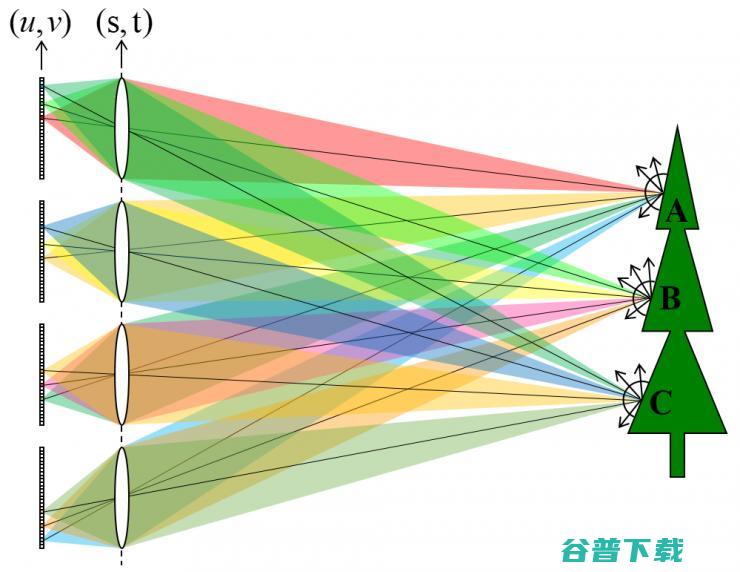
图 5. 基于相机阵列的光场采集示意图
相比基于微透镜阵列的光场相机,基于相机阵列的光场采集方案具有两个明显的优势:(1)采集光场的FOP角度较大,也即视差较大,可以在较大的角度范围内变换视点。(2)图像分辨率不损失,因此单个视点的图像分辨率一般都高于基于微透镜阵列的光场相机。但基于相机阵列的光场采集方案也存在成本高昂,体积较大的明显缺陷,例如图6中Jason Yang于2002年在MIT搭建出全世界第一套近实时相机阵列[20],由8x8共64个相机组成,单个视点分辨率为320x240,光场采集速率为18FPS,延迟为80毫秒。
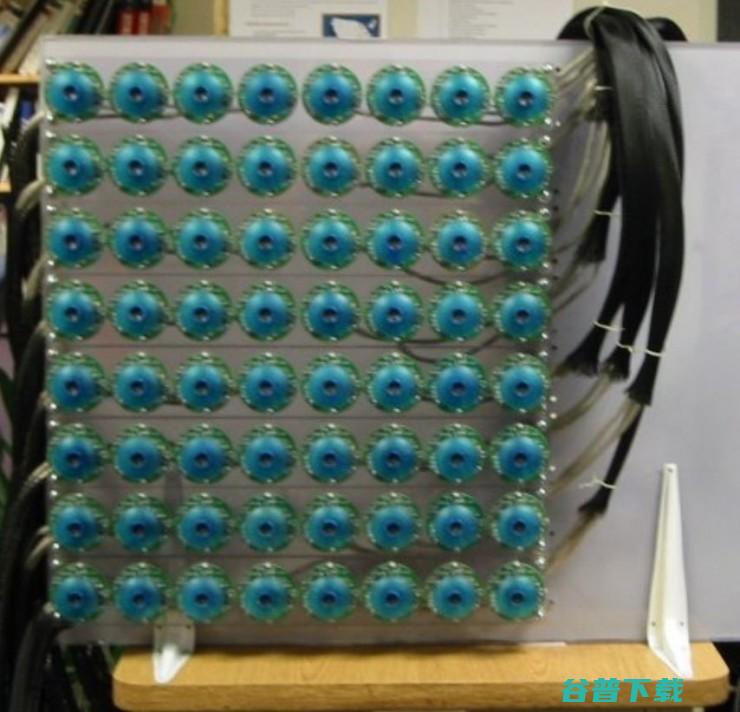
图 6. Jason Yang于2002年在MIT实现的实时相机阵列
斯坦福大学Bennett Wilburn在2000年实现了数据编码压缩的光场视频相机[21],之后进一步改进光场相机系统,在2004年展示了稠密光场相机阵列[22]。Bennett Wilburn设计的稠密光场相机阵列包含52个30fps的COMS成像单元,单个视点分辨率为640x480,如图7所示。
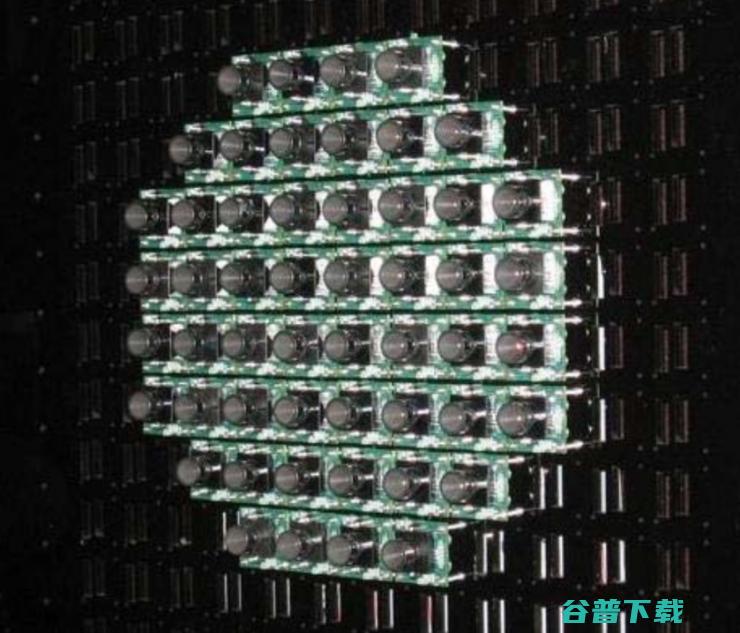
图 7. Bennett Wilburn于2004年在斯坦福大学设计的稠密光场相机阵列
Bennett Wilburn在2005年进一步增加相机数量到约100个,构建了大规模光场相机阵列[23],并搭建了三种不同类型的大规模光场相机,如图8所示,分别是(a)紧密排列的长焦镜头大规模相机阵列,主要用于实现高分辨率成像。(b)紧密排列的广角镜头大规模相机阵列,主要用于实现高速视频捕获和混合合成孔径成像。(c)分散排布的大规模相机阵列。

图 8. Bennett Wilburn于2005年在斯坦福大学设计的大规模光场相机阵列
由于硬件成本高昂,体积较大等缺点,目前To C端的应用中还没有采用基于相机阵列的光场采集方案。曹煊在2015年提出稀疏相机阵列光场采集方案[24],利用压缩感知和稀疏编码大大减少了相机数量,降低了硬件成本,但仍然存在体积大的问题。Pelican是美国硅谷的一家创业公司,正在尝试将相机阵列小型化。该公司在2013年实现了超薄高性能的相机阵列[25],如图9所示。通过光学设计的优化[26]和光场超分辨算法的应用[27,28],Pelican制造了小巧的相机阵列,并形成一个独立的光场相机模块。Pelican综合了多种方法在保持相机阵列轻薄的前提下提升了所采集光场分辨率[29,30]。
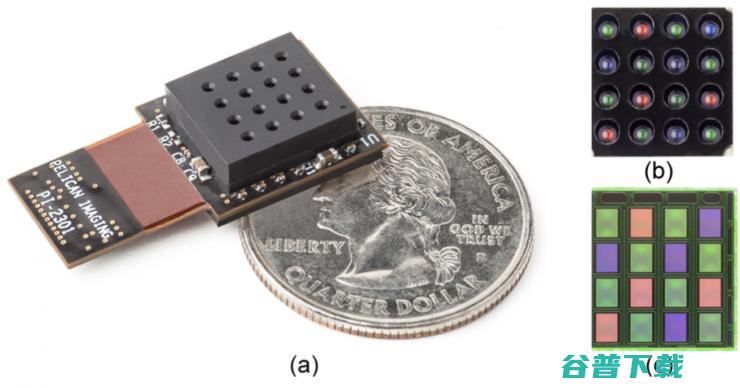
图 9. 美国初创公司Pelican设计的超小体积高性能相机阵列
3、基于编码掩膜的光场采集
基于微透镜阵列和基于相机阵列的光场采集都有一个共同点——“阵列”。前者通过多个微透镜构成阵列,牺牲图像分辨率换取角度分辨率。后者通过多个相机构成阵列,在不牺牲图像分辨率的情况下增加了角度分辨率,但是需要增加大量的图像传感器。总体而言,视点分辨率与角度分辨率是一对矛盾因素,总是此消彼长。通过增加成像传感器数量来抵消这一矛盾会造成硬件成本的急剧增加。
上述两种光场采集方案必须在图像分辨率和角度分辨率之间进行折中。学术界最新出现的基于编码掩膜的光场采集打破了这一局限。该方案通过对光场的学习去掉光场的冗余性,从而实现了采集更少的数据量而重建出完整的光场。
如图10所示,在传统相机的成像光路中加入一片半透明的编码掩膜,掩膜上每个像素点的光线透过率都不一样(也称为编码模式),进入光圈的光线在到达成像传感器之前会被掩膜调制,经过掩膜调制后的光线到达成像传感器。利用提前学习好的光场字典,从单幅采集的调制图像就可以重建出完整的光场。掩膜的编码模式理论上可以采用随机值,Kshitij Marwah证明了通过约束变换矩阵的转置与变换矩阵的乘积为单位矩阵可以得到优化的编码掩膜,采用优化后的编码掩膜可以重建出更高质量的光场。

图 10. Kshitij Marwah于2013年在MIT设计的掩膜光场相机
很多学者已经尝试利用编码掩膜来实现计算成像,例如国立台湾大学的Chia-Kai Liang 在2008年采用可编程的光圈结合多次曝光成像实现了光场采集[31]。美国MIT大学在掩膜相机方面的研究非常深入,MIT大学CSAIL的Anat Levin 于2007年采用编码光圈实现了深度图像的采集[32],MIT Media Lab的Veeraraghavan Ashok 在2007年采用掩膜实现了可以重聚焦的相机[33],后于2011年结合闪光灯和相机掩膜实现了对高频周期变化的图像进行高速摄像[34]。MIT Media Lab的Kshitij Marwah于2013年提出了基于掩膜的压缩光场采集[35]。
基于编码掩膜的光场采集方案最大的优势在于不需要牺牲图像分辨率就能提高角度分辨率。但该方案存在光场图像信噪比低的缺点,这主要是由于两方面的原因造成:(1)掩膜的透光率不能达到100%,因此会损失光线信号强度,导致成像信噪比低;(2)所重建的最终光场图像并不是成像传感器直接采集得到,而是通过从被调制的图像中进行解调制得到;本质上是基于已经学习的光场字典去“猜”出待重建的光场。
4、光场采集方案对比
上述三种主流的光场采集方案与传统相机总结对比如下表。
表1. 传统2D采集设备与光场采集设备的对比
| 采集数据维度 | 优点 | 缺点 | |
| 传统相机 | R(x, y, λ, t) | 技术成熟, 价格低廉 |
只能采集平面图片, 等同于角度分辨率为1X1的低阶光场 |
| 微透镜阵列 | R(x, y, θ, Φ, λ, t) | 体积小, 成本较低 | 图像分辨率损失严重 |
| 相机阵列 | R(x, y, θ, Φ, λ, t) |
基线大,视差大 图像分辨率较高 |
成本高,体积大 硬件同步困难 |
| 编码掩膜 | R(x, y, θ, Φ, λ, t) |
体积小 分辨率不损失 |
信噪比低 光场质量下降 |
基于微透镜阵列的光场采集具有体积小巧,硬件成本低等优点。但其缺点也很明显:1)光场视点图像分辨率损失严重,随着视点数量的增加,单个视点分辨率急剧降低。2)受到相机光圈的限制,光场中可观察的视差范围较小。
基于相机阵列的光场采集相比基于微透镜阵列的光场采集具有更多优点:1)视点分辨率不损失,由单个相机成像传感器决定。2)光场的视差范围更大。但基于相机阵列的光场采集仍然面临两个问题:1)需要的相机数量较多,硬件成本高昂,例如采集7x7视点的光场需要49个相机。2)相机同步控制复杂,数据量大,存储和传输成本高。
基于编码掩膜的光场采集打破了角度分辨率与视点图像分辨率之间的互相制约关系,利用“学习”的方法去掉光场冗余性,从少量信息中恢复光场。虽然存在信噪比降低的问题,但在2K时代,分辨率不损失这一优点使得该方案受到广泛关注。
[1] Van Berkel C. Image Preparation for 3D-LCD[C]//Stereoscopic Displays and Virtual Reality Systems VI,1999.
[2] Chai J X, Tong X, Chan S C, et al. Plenoptic sampling[C]// Conference on computer Graphics and Interactive Techniques. ACM Press/Addison-Wesley Publishing Co. 2000:307-318.
[3] Levoy M. Light Fields and Computational Imaging[J]. Computer, 2006, 39(8):46-55.
[4] Lanman D. Mask-based light field capture and display[C]// Ph.D. Dissertation, Brown University, 2011.
[5] Lippmann G. Epreuves reversibles. Photographies integrals[J]. Comptes-Rendus Academie des Sciences, 1908, 146(3):446-451.
[6] Roberts D E. History of Lenticular and Related Autostereoscopic Methods[J]. Leap Technologies Hillsboro, 2003.
[7] Adelson E H, Wang J Y A. Single Lens Stereo with a Plenoptic Camera[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 1992, 14(2):99-106.
[8] Levoy M, Ren N, Adams A, et al. Light field microscopy[J]. Acm Transactions on Graphics, 2006, 25(3):924-934.
[9] Hoshino H, Okano F, Isono H, et al. Analysis of resolution limitation of integral photography[J]. Journal of the Optical Society of America A, 1998, 15(8):2059-2065.
[10] Ren N, Levoy M, Bredif M, et al. Light Field Photography with a Hand-Held Plenopic Camera[J]. Tech. Rep. CSTR Stanford Computer Science. 2005.
[11] R. Ng, “Digital light field photography”, PhD. Thesis, Stanford University, 2006.
[12]
[13] www.raytrix.de
[14] Raytrix, “Digital imaging system for synthesizing an image using target="_blank">转载须知。


黑谷科技专注于为全行业的实体店提供一站式的门店经营解决方案,目前覆盖的行业包括汽修、美业、餐饮、教育、酒店、KTV等实体店,通过自主研发的共享店铺模式及员工合伙机制,全面的解决门店的客源、营业额、及员工管理问题。

超级店长是光云科技旗下的一款中小商家SaaS工具,围绕商品、装修、复制搬家、打单发货、促销、交易评价、一件代发、分销下单、财务利润等多场景的解决方案,涵盖淘宝、1688、京东、抖音等数十个电商平台

三方易仓储(苏州)有限公司(0512-66216663)提供:电商云仓外包与电商仓库配送服务,电商仓配一体化,仓储、装卸、分拣、打包、物流配送的公司,苏州、广州、上海,多云仓支持,致力于为淘宝、天猫、京东、微商、有赞、拼多多等电商企业解决仓储和配送,三方易将是您生意上最佳的合作伙伴!

赛鸽资讯网是汇集全球信鸽赛鸽资讯,赛鸽公棚,信鸽协会,赛鸽俱乐部,信鸽视频,信鸽交易,铭鸽展示,鸽舍,鸽业,免费建站为一体的专业信鸽网站,为鸽友提供及时,全面,丰富的赛鸽资讯。

易班网是高校教育教学,生活服务,文化娱乐的综合性互动社区,为在校师生提供主页定制,社区交流,空间存储,群组聊天,在线学习,活动发布,兴趣交友等教育信息化一站式服务功能,是全国最具影响力的学生网络互动社区之一。

江苏盈福特国际物流有限公司

25年专业生产各种交通信号灯交通信号杆,交通标志杆监控杆,交通信号机,免费电话15189893388微信同号,提供咨询报价-生产运输-指导安装一整套厂家服务,产品销往全国各地,老客户回购率高,质好价优,欢迎前来咨询选购!

作图就用爱设计,活动海报,公众号配图,朋友圈封面,电商等百万可商用模版一键出图,只需拖拉拽三步在线图片编辑,从此设计不求人

南昌治疗小儿多动症,抽动症,自闭症哪家医院好?首选南昌二七医院,是南昌专业治疗多动症,抽动症,自闭症,发育迟缓的专科医院,也是解决儿科疾病的专科医院.

环球酒业网汇聚多种酒类最新的行业资讯,主要栏目有名酒、百科、动态、资讯、酒品、热点、鉴定、行情、招商、新品、活动、品牌。

重庆恒生五色石管道设备主营管道带压开孔机,爆管抢修哈夫节,开孔机厂家,管道开孔机,管道带压开孔,拥有专业的施工团队,带压开孔技术成熟,精湛的技术,完善的售后服务,欢迎来电咨询!

浙江音乐学院是由教育部于2016年3月1日批准成立的公办全日制普通本科高校,以本科教育为主,同时承担研究生培养任务。由浙江省人民政府举办,省文化厅主管。联系电话:0571-89808000


语音播放文章内容由深声科技提供技术支持您的浏览器不支持audio元素,自2016年苹果公司推出iPhoneSE以来,一直有传言称苹果公司将推出iPhoneSE2,要知道,从刘海屏、全面屏到折叠屏,智能手机屏幕是朝着不断变大的趋势而行的,在这样的背景下,苹果公司如果推出小屏手机iPhoneSE2似乎是逆势而为,那么,iPhoneSE2有...。

7月16日,盒马首届,挪威可生食三文鱼节,在上海、北京、广州、深圳、南京、杭州、合肥7个城市同时开幕,作为肉质鲜美、营养丰富的鱼类代表,越来越多的进口三文鱼,跳,上国人餐桌,其价格也逐年下降愈发亲民;为了让用户明白消费、安心吃鱼,盒马的进口三文鱼也打上了,可生食,标,盒马第一届挪威可生食三文鱼节在上海盒马鲜生新江湾店开幕,挪威三文鱼...。

近日,字节跳动完成对高端私立医疗机构美中宜和的全资收购,天眼查App显示,收购完成后,美中宜和目前共有两大股东,其一为由抖音全资控股的小荷健康科技,北京,有限公司,另外一位股东为小荷健康香港有限公司,两者持股比例合计100%,去年9月,字节通过前者首次投资美中宜和,时隔近一年,后者的入股让字节正式成为美中宜和的,主人,字节为什么会选...。

袁天罡有许多非同常人的本事,比如能够听风声预测未来,能够看人的面相预测人的未来,借鉴的,称骨歌,能够很大水平的预测人的永世,只管这些在如今看来仿佛有点迷信,但理想证实准确率还是蛮高的,毕竟这世上迷信不能处置的事件还是很多的,袁天罡是隋末唐初人士,其出身家庭并不怎么,十分穷苦,然而袁天罡自己却十分好学,特意是无关预测人的未来,人的面相的...。

北汽绅宝x35是一款前驱的小型SUV,前驱也被称为前轮驱动,这象征着汽车的能源只调配给前轮,车身尺寸方面,2016款北汽绅宝x35智能奢侈版的长为4300mm,宽为1815mm,高为1640mm,轴距为2570mm,油箱容积为46L,这款车搭载1.5L人造吸气发起机,最大功率为85kW,最大功率转速为每分钟6000rpm,最大扭矩为1...。

enormous的意思,adj.庞大的,渺小的;凶暴的,极恶的,读音,英[ɪˈnɔːməs];美[ɪˈnɔːrməs]短语enormouscost渺小的代价enormousamount渺小的数量enormouslosses渺小的损失enormoustransition巨型变迁裁减资料,同根词词根,enormous渺小地,庞大地;十分地...。

近日,某网民颁布视频称,渝北水木天地门口杀死3团体摆起的,,经重庆警方核实,系打架事情,无人员伤亡,网传信息为谎话,概略重庆渝北区购物的商场有哪些,南区路口,水木天地,服装城,海宁从重庆江北机场到大足县怎么走重庆江北机杨在重庆市渝北区,重庆到大足最短距离,102公里从机场到市区最多不打表50元;如果大巴则是15元陈家平和菜圆坝都可以到...。

相关链接,视频,婚姻围城内外哪里更幸福视频,老板比员工更幸福吗视频,男人更累还是女人更累视频,钱能让人变得更自在吗视频,钱是幸福的必要条件吗大在校生7年守业两次遭学校开革华声在线副总裁孙虹钢自曝最早注册百草减肥茶,女强者,路彬彬PK牛群,女人比男人更累牛群做客,大家认识,谈蒙城五年称感到幸福杨二车娜姆谈婚姻幸福,我不须要依托刘彦斌,责...。

斯巴鲁XV是一款中级越野车,该车在斯巴鲁的车型系列中领有较高的性价比,适宜喜欢户外优惠的年轻一代,斯巴鲁XV的形状时兴大气,内饰更是极富质量感,它的安保性也获取了大家的宽泛认可,1.外观设计斯巴鲁XV外观设计时兴、现代,间断了斯巴鲁一向的时兴大气,外观全体线条流利,让人一看便知道它的非凡,前脸驳回了斯巴鲁共同的鱼鳞式格栅,它的头灯驳回...。

装备了1353TL4发起机,发起机最大功率是96kW,峰值扭矩为211牛·米,婚配7挡双离合变速箱,最高车速200kmh,工信部综合油耗为53L100km性能性能方面,起亚K3装备车道坚持辅佐系统主副驾安保气囊车道偏离预警系,款改款15LCVT青春版是不少生产者所关注的车型,上方小编就为大家简明引见一下这款车,顺便再算算买它须要多少钱...。

昨天又发布了一个新的大模型叫双子座时代干爆谷歌发布新大模型打开就能看到据说非常强然后是一大堆夸奖大概是本月中旬的时候正式推出标题明晃晃写着最大最强主打的就是一个干爆干爆谷歌发布新大模型人工智能微新闻第张干爆谷歌发布新大模型人工智能微新闻第张我们先看一下参数看视频动作能猜出你在做什么比如就直接猜出你在玩石头剪刀布的游戏干...

Cutter是一个多平台逆向工程工具,满足有逆向需求的用户,在软件上进行逆向操作,界面简洁,支持中文,用户不用担心看不到,使用非常简单。
在探讨2024年近视眼加盟领域的品牌排行时,易视界品牌无疑是一个值得深入了解和考虑的选项,以下是对该品牌以及近视眼加盟领域别的品牌的排行和分析,易视界品牌分析品牌影响力,易视界作为全国连锁性眼健康综合服务机构,在视力保健和视力防护领域具有较高的认可度和美誉度,其品牌在市场上赢得了广泛认可,为加盟商提供了稳定的客流基础和信任,技术实力,...。

昨天,雷锋网曾报道碳云智能在喊着数字化生命的理想,发布第一款数字化生命平台后,举办了几场论坛,其中一场数字化生命医疗健康产业论坛,讨论精准医疗和个体化健康管理离我们有多远,这次论坛三方鼎力,分别是医生代表,微博大V崔玉涛,广州妇儿中心院长夏慧敏;保险商,友邦保险集团主席&,CEOMarkTucker,中国人寿保险深圳分公司总经理...。

7月15日,以,开启AI学习新时代,为主题的科大讯飞AI学习机新品发布会在北京成功举办,正式宣布讯飞智能学习机更名为科大讯飞AI学习机,并现场发布旗下AI学习机全新力作——T10高端旗舰新品,科大讯飞董事长刘庆峰、科大讯飞副总裁章继东等出席此次发布会,与广大合作伙伴、用户、媒体等一起共同探讨教育减负时代背景下的应对之道,据悉,新品讯飞...。

发表在综合交流大区2022,5,2519,28导读,马上就要618了相信很多小伙伴都想趁着各家品牌打折的日子去购买自己心心念念的投影仪产品,选购投影仪也是618之前的一件大事,品牌这么多,优惠力度五花八门让人眼花缭乱,这么多参数看也看不懂,完全不知道怎么选啊,不用怕,这篇文章就是来帮助大家如何在618之前就挑好自己心仪的投影仪,提前加...。

发表在专业问答2023,2,516,02展示机型信息,品牌型号,索尼X80J系统版本,当贝OS定制版oled屏幕本身是不伤眼睛,伤眼睛的是屏幕亮度过高,对眼睛的刺激大,因为oled屏幕是自发光,屏幕更轻薄,可做成柔性屏,它的色域广,具有高对比度,响应速度快,oled屏幕伤眼睛吗OLED即有机发光显示器,因此本身对眼睛的刺激不是很大,它...。
