ICRA 香港大学团队获最佳会议论文 2018奖项全公布 (icc香港)

雷锋网 AI 科技评论按:ICRA 2018 本周于澳大利亚布里斯班举行。随着会议议程的推进,今天也迎来了本次大会的重头戏——ICRA 相关奖项的颁布仪式。
ICRA 2018 颁奖仪式包括 IEEE 系列奖项及 ICRA 2018 论文奖项等两个环节。
论文颁奖环节
ICRA 2018 大会主席 Peter Corke 在大会开场提供的论文数据显示,美国以 630 篇投递论文领跑 ICRA 2018;而位于第二梯队的则是中国(230 篇)、德国(159 篇)、日本(115 篇);第三梯队的意大利、法国、英国、韩国均在 80 篇左右。
而在开会前,今年的论文获奖提名名单已经公示,雷锋网 AI 科技评论发现,共计 11 大奖项共 40 篇提名论文,但无一来自大陆高校。如果加上港澳台等高校,则有香港大学的 Ziyan Guo 团队、台湾成功大学的 Chao-Chun Chen 团队等两个团队获得获奖提名。
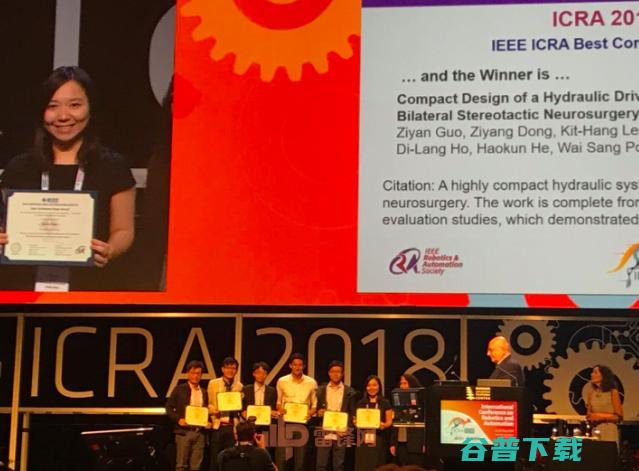
最终,来自香港大学及威尔斯亲王医院的 Ziyan Guo 团队凭借 Compact Design of a Hydraulic Driving Robot for Intraoperative MRI-Guided Bilateral Stereotactic Neurosurgery 合作论文获得了 ICRA 最佳会议论文。这篇论文设计了一种高性能液压机器人平台,该机器通过磁共振成像(MRI)引导双侧立体定向程序,能够在标准头部成像的有限空间内进行操作。
获奖理由: 这一高性能液压系统能够与磁共振成像为主导的神经外科相结合,该工作从设计、到延展、再到相关的评估标准制定,都为后续的外科研究提供了理论基础及实践空间。
来自瑞士苏黎世理工学院及 DeepMind 的合作论文 《Accurate and Adaptive In situ Fabrication of an Undulated Wall using an On-Board Visual Sensing System》 斩获自动化领域最佳论文。
作者提出了一个全尺寸、承重和双弯钢筋混凝土墙的建筑制造系统。团队构建了一个 12 米的钢丝网,内有两个互补的、基于视觉的传感系统以作为建筑工艺的独特感知系统。系统通过 CAD 模型对机器人姿态进行评估,并及时对施工过程中的建筑结构精度做出反馈。此外,在构建过程中,系统也会根据实际情况(如系统误差、材料变形等)进行调整。实验结果显示,系统构建完成度达 98%,且误差为 2cm。
获奖理由: 这一论文从一个崭新的领域有效利用自动化,其在建筑方面所起到的作用也非常新颖独到。
CMU 的三人团队凭借 SoCIAl Attention: Modeling Attention in Human Crowds 获得这一奖项。他们规划了一个预测人群轨迹的系统,使机器人能够在人群中顺畅行走而不发生碰撞。团队在现场展示时介绍道,人类在路上行走的过程实际上包含了一种潜在合作( implicitly cooperation),人类对彼此行走轨迹的预测已经有了一个围绕交互关系而建模而成的函数。但这并非适用于系统中,毕竟它对每个路人的重要性评估并不准确。因此团队提出了一种名为「Social Attention」(社交注意力模型)的轨迹预测模型,抛却关注物体间的物理距离,而是捕捉每个人在行走过程中与主体间的相对重要性。
获奖理由: 基于注意力机制的模型能够更为准确地预测密集人群的行走关系,并混合了 RNN 模型的人群时空轨迹来学习,这也被称为「社交注意力」,能够反映个体行人在规划路径过程中相对影响关系。

《Interactively picking Real-World Objects with Unconstrained Spoken Language Instructions》是一篇来自日本 Preferred Networks 的工作。囿于口语的复杂结构及人类指示本身具有的模糊性,因此如何理解口语中的自然语言成为了人机互动及沟通的重要内容。在文章中,团队提出了首个可处理无约束口语(Unconstrained Spoken Language)的系统,并能有效解决口语指令中的歧义。
获奖理由: 这一论文的新颖之处在于将现有的边界框预测方法与自然语言处理技术融合在一个简单的框架中。这一工作非常有趣,或将很快应用于实际中。
哈佛大学等高校合作的《A lightweight and efficient portable soft exosuit for paretic ankle assistance in walking after stroke》摘得这一奖项。
获奖理由:一个自适应的便携式柔软机器人外用衣,可以在未来帮助中风患者行走。
最佳多机器人系统论文
密歇根大学的《Pairwise Consistent Measurement Set Maximization for Robust Multi-robot Map Merging》获得这一奖项。
获奖理由: 这一论文提出了一种多机器人采用 SLAM 在闭合地图中进行鲁棒性选择路径的方法,得以高效地基于真实数据寻找高质量的解决方案,并为现实生活问题提供可借鉴的实际方案。
斯坦福大学的《Decentralized Adaptive Control for ColLaborative Manipulation》提出了一种去中心化的自适应控制器,能让一组智能体控制有效载荷。
获奖理由: 从设计到实践应用中,这个分布式自适应控制器能有效让多个机器人合作搭载未知的物体。
弗莱堡大学团队在《Optimization Beyond the Convolution: Generalizing Spatial Relations with End-to-End Metric Learning》中提出了一种基于距离度量学习以延展到空间关系的新型端到端方法。团队构造了一个神经网络,将物体的三维点云转化为度量空间,并只使用物体的几何模型描绘空间关系的相似性。
获奖理由: 设计了一种物体间的空间关系,表征具有连续性及泛化性。
谷歌大脑及新墨西哥大学团队在获奖论文 《PRM-RL: Long-range Robotic Navigation Tasks by Combining Reinforcement Learning and Sampling-based Planning》中提出了一种用于远程导航任务完成的分级方法,将基于采样的路径规划与强化学习(RL)相结合,并且采用相同的强化学习智能体在规划指导下控制机器人,实现远程导航。
获奖理由: 不论在模拟环境或是实际应用环境,这一工作都具有参考意义。
ICRA 2018 年首次新增了这个奖项。
东京大学团队的《Design, Modeling and Control of Aerial Robot DRAGON: Dual-rotor-embedded-multilink Robot with the Ability of Multi-deGree-of-freedom Aerial TransformatiON》摘得头魁。
获奖理由: 设计和实施了可变形的飞行机器人,适用于航空操纵和模块化任务相关结构。
《Design of an Autonomous RAcecar: Perception, State Estimation and System Integration》来自瑞士苏黎世联邦学院的团队设计了一辆完全自主控制的赛车。
获奖理由: 团队采用全车载传感器,并凭此获得一级方程学生无人赛车比赛的冠军。
IEEE 系列奖项
这一奖项设置于 2002 年,旨在表彰对这一领域做出巨大贡献的学者。今年这一奖项颁给了 CMU 教授 Matthew T. Mason.
值得一提的是,2017 年的这一奖项颁发给了斯坦福大学教授 Oussama Khatib,他曾作为 CCF-GAIR 2017 的演讲嘉宾来到大会现场。
今年共有 21 位新晋 IEEE Fellows,名单如下:
这一奖项分别颁给了宾夕法尼亚大学教授 Vijay Kumar 和 MIT 教授 Daniela Rus。这二位教授都曾莅临 CCF-GAIR 大会做演讲,Kumar 还是作为 CCF-GAIR 2016 最佳演讲嘉宾返场 2017 大会。

获奖者为比萨大学的 Autonio Bicchi 和田纳西大学教授 Bill Hamel。
获奖者为 Torsten Kroeger 及 Frank C. Park。
获奖者为 Tu Delft 的 Jens Kober、MIT 的 Julie Shah 及 SRI 的 Alexander Kernbaum.
这是一个 ICRA 2018 新设立的奖项,主要表彰在过去 10 年/ 20 年/ 30 年内产生巨大影响力的论文。
获奖名单如下:
1988 年:
"Shape Memory Alloy Servo Actuator Systemwith Electric Resistance Feedback and Application for Active Endoscope"
1998 年:
"The Development of Honda Humanoid Robot"
2008 年:
"A New Variable Stiffness Design : Matching Requirements of the Next Robot Generation"
"Probabilistic Articulated Real-Time Tracking for Robot Manipulation"
"A Robotic Bird of Prey"
"Generalized Wavelet Shrinkage of Inline Raman Spectroscopy for Quality Monitoring of Continuous Manufacturing of Carbon Nanotube Buckypaper"
"A System for Automated Detection of Ampoule Injection Impurities"
"Characterizing and Imaging Gross and Real Finger Contacts under Dynamic Loading"
"Using Pot-Magnets to Enable Stable and Scalable Electromagnetic Tactile Displays"
以上便是所有 ICRA 2018 论文的获奖信息,更多颁奖信息敬请关注雷锋网 AI 科技评论的新闻。
原创文章,未经授权禁止转载。详情见 转载须知 。



西北油价网提供最新的全国各个城市的92号汽油价格,95号汽油价格,98号汽油价格,0号柴油价格等国内汽油价格查询和柴油价格的查询,每天时时更新,为你提供最新的油价调整信息。

质子矩阵致力于工业自动化、信息化及数字化,以物联网、大数据、云原生、虚拟/增强现实和人工智能为代表的创新技术,深度融合工业生产,深耕智能制造,为企业提供优秀的控制与信息管理平台。

vivo官方商城-提供vivo、iQOO最新款智能手机/原装配件购买,专业影像旗舰vivoX80系列、折叠屏旗舰vivoXFold、大屏商务旗舰vivoXNote、vivoS12、X70系列、iQOO9Pro、iQOONeo6等,同时提供手机以旧换新、镭雕定制服务及售前售后支持.

长沙尚格影视制作传媒专注企业宣传片制作、企业三维动画制作、企业短视频拍摄制作、微电影制作等互动多媒体视频制作服务,20多年专业服务,企业宣传片制作收费报价合理,企业宣传片制作哪家好?推选长沙尚格影视!

LifeVC,designhappinessforyourhome。现在就访问LifeVC官方商城,多达10000种欧洲家居灵感,陪你生活一辈子!

河北铸翰教育科技有限公司专注于教育资源的开发与深耕,开发先进的教育产品,提供完善的教育服务,构建专业化的互联网运营平台,书法小状元隶属于铸翰教育旗下,是集教材研发销售、线上书法课程和线下双师课堂于一体的书法教育品牌。

上海三问家居科技股份有限公司,是中国时尚家居原创设计领军企业。三问家居定位于“全球客户与供应商*有价值合作伙伴”,为全球中高端零售商提供特色家居服饰的原创设计、营销企划及供应链管理一体化服务,多年位列中国家纺出口百强,是中国海关进出口指数企业,被客户誉为“世界花式纱披巾之王“。

宏远单招培训/山东单招综评考试/单招/山东单招综评/宏远教育培训/2023单招/单招综评报名入口。咨询电话:17686666602

H+是一个完全响应式,基于Bootstrap3最新版本开发的扁平化主题,她采用了主流的左右两栏式布局,使用了Html5+CSS3等现代技术

安华鼎科技有限公司专注于专网通信,主要产品包括MSTP、MSAP、PTN、EPON、特种摄像头、综合视频监控、多媒体调度指挥系统、在线教育系统、综合辅助决策系统平台。。

泰兴市超凡机械有限公司主要生产行走式焊接滚轮架、可调式焊接滚轮架、自调式焊接滚轮架,我们拥有优良的技术与良好的制度,欢迎来电咨询!

网站首页|成都市元辰食品有限公司是一家专注于马铃薯粉条、红薯粉条、火锅粉条及酸辣粉等传统工艺手工制作的食品企业。公司成立于2012年8月16日,总部位于成都市彭州市敖平镇紫音泉村18组22号,注册资金为10万元。

#净网护网,有你有我#,提高防范意识,捂紧,钱袋子,哦!,一起来看公检法警宝们共同演绎的反诈骗拍手歌吧!网络贷款要警惕,兼职刷单全是骗,,安全账户,不安全,虚假链接不点击!安徽公安在线的微博视频来源,松松科技QQ,微信,lusongsong7本文地址,https,down.lusongsong.com,info,11925.htm...。

在自动驾驶被热捧之时,ADAS行业显得有些落寞,不是每家公司都能成为Mobileye,最令人唏嘘的是,如Mobileye这样的巨头最终还是逃不脱被收购的命运,但这不是个坏选择,反观国内一大批从事ADAS研究的创业公司,他们未来的出路在哪里,这个问题的最优解似乎已经出现,近日,被,安卓之父,AndyRubin看上的自动驾驶创业公司Nau...。
小冰学习绘画是我所领导的团队目前为止进行的时间最长、最艰苦的一个项目,微软小冰研发团队在今年5月微软小冰人工智能创造媒体说明会上表示,被微软小冰研发团队视为耗时最长、最艰苦的项目的绘画模型,是微软小冰针对视觉能力攻克的模型,也是继文本、语音之后的第三类AI模型,据官方资料显示,这一模型通过对过往四百年艺术史上236位人类画家画作的...。

语音播放文章内容由深声科技提供技术支持您的浏览器不支持audio元素,雷锋网消息今天,沃尔玛中国在其一年一度的发展商大会上宣布,未来5,7年计划在中国新开设500家门店和云仓,包括沃尔玛购物广场、山姆会员商店、沃尔玛社区店多个业态,沃尔玛对中国市场充满信心,持续加大投资发展,除了开设新店,未来3年还将对200家现有门店进行大刀阔斧的升...。
法律分析,严重,一般警方发出通告的案件是进行通缉的案件,触犯犯罪的案件,法律依据,中华人民共和国人民警察法,第二条人民警察的任务是漏团维护返颤橘国家安全,维护社会治安秩序,保护公民的人身安全、人身自由和合法财产,保护公共财产,预防、制止和惩治违法犯罪活动,人民警察包括公安机关、国家安全机关、监狱、劳动教养管理机关的人民警察和洞神人民...。

上海冠松是上海市内驰名的一家五星级酒店,它位于上海市中心的申嘉湖边,领有绝佳的位置长处和温馨的环境,它领有宽阔的客房,每个客房都有独立的浴室和奢侈的家具,提供一流的服务体验,一、客房设备上海冠松的客房设备完全,每间客房都装备了洁净整洁的床,电视,冰箱,空调,洗衣机,浴室等设备,还提供收费的宽带上网服务,让主人们能够预备畅游上海的行程,...。

1.救生锤的尺寸理论为13.5厘米长、7厘米宽、2.5厘米厚,色彩规范为醒目白色,重量大概为150克,便于携带,2.救生锤的头部尖利且结实,在遇到紧急状况时,可用于击碎玻璃以便逃生,3.内置的割刀呈钩状,内嵌式刀片设计,在风险状况下可用于割断安保带以便逃脱,4.救生锤反面设计有平锤,经常使用模式与前面提到的榔头相似,5.安保锤的正确经...。
纵览资讯记者任利据微信群众号,吉林市颁布,信息,7月1日,吉林市政府资讯办召开环球锅包肉大赛赛事状况资讯颁布会,颁布会上,吉林市商务局党组成员、副局长仲伟岩引见,吉林市拟组建吉林市餐饮名品推行办公室暨锅包肉办公室,吉林市拟组建锅包肉办公室,这一话题也冲上热搜,引发宽泛热议,有网友点赞,也有网友示意质疑,据吉林市商务局官网群众号,吉林...。

辽宁营口沉船意外致6人失联12艘船只介入搜救记者,白德彰7月3日,网传辽宁营口市在建陆地公园左远海域出现沉船意外,疑似失踪6人,4日,新黄河记者核实了解到,事发地在辽宁盖州市海域,海警部门上班人员通知记者,意外形成4人死亡,另外2人正在搜救中,另据凑近官网的知情人称,涉事船只系,三无,渔船,涉嫌违法出海,网传视频截图,船只疑似漂浮海中...。

五菱凯捷是广西五菱汽车股份有限公司消费的一款小型轿车,因其外观时兴、经济适用而备受消费者喜欢,上方将为大家引见五菱凯捷的各种报价及图片信息,五菱凯喜报价,五菱凯捷共有6款不同车型可供选用,多少钱从4.29万元到5.99万元不等,其中凯捷C1汽油规范型报价4.29万元,凯捷C11.5L智能型报价为5.19万元,凯捷C2奢侈型报价为5.6...。

carrey全场什么意思首先,应该是carry。本意是携带,carry全场就是带动全场。就是你在场中是带节奏的,没了你不行。望采纳就是全场的人由于惊愕或者突然而发出的声音。2,LOLCARRY全场什么意思回复楼主:carry在英文中,有一个意思为“支撑,支持”,简单的从字面上理解,可以理解为支撑全场。在DOTA中,CARRY是指的后期强力的团队核心输出。在英雄联盟中,CARRY可以定义为某一个英雄,而CARRY全场在大部分意义上并不针对某一个玩家或英雄,更多的是指一名玩家在游戏中的表现,表现的能带动全

顺企网金华公司注册服务公司厂家大全列表,包括浙江卓志企业管理咨询有限公司、浙江卓志企业咨询管理有限公司、义乌市企梦企业管理咨询有限公司、义乌市诚信通电子商务有限公司等在内的22家金华公司注册服务公司厂家的地址电话法人代表和联系电话等信息。1页,当前显示第1页结果,按照产品多少和注册时间排名

西游记,是大家都非常熟悉的一部经典著作,因为设定非常新颖,很受大家的喜欢,所以现在市面上有很多游戏也是以,西游记,作为背景设定的,接下来带来的是西游竖屏回合制卡牌游戏,竖屏的模式让玩家可以单手操作,如果对于这种,西游记,题材的设定感兴趣,那就可以一起看下去,1、,卡牌西游,卡牌西游这个游戏可以算得上是首款以,西游记,作为题材设计的卡...。

ZNDS智能电视网获悉,当贝PadGO新品将于3天后,10月23日,正式上线,这标志着在智能投影大获成功后,当贝将再次进军新领域,据知情人士透露,当贝PadGO为移动智慧屏类产品,拥有4K超高清分辨率,且搭载经过深度优化的当贝OSforPadGo,系统操作更流畅,综合各方信源及官方发布信息,ZNDS智能电视网为大家总结当贝PadGO发...。

千年以来,民以食为天都是中华民族代代相传的信条,不知有多少商业巨贾都是从餐饮创业开始发家的,这充分说明了餐饮项目所具有的价值,但是对于很多普通人来说,餐饮行业大的项目智慧之选过高,遥不可及,这个时候,小餐饮项目加盟就变得非常热门了,那么,一般小餐饮加盟费需要多少呢,小餐饮加盟项目有哪些呢,小餐饮加盟费什么是小餐饮,小餐饮就是指智慧之选...。

奥黛丽赫本的死因是结肠癌并发症,奥黛丽赫本是一位备受全球瞩目的演员,她在电影界的杰出贡献永载史册,然而,这位美丽的明星晚年面临了一个严峻的健康挑战,她在生命的最后阶段被诊断出患有结肠癌,这是一种恶性肿瘤,发生在结肠部位,尽管赫本积极接受治疗,但病情仍然出现了并发症,这些并发症可能包括肠梗阻、穿孔或其他严重的健康问题,严重削弱了她的身体...。

现如今超市已成为比较常见的购物场所,有着丰富多样的商品以供消费者自行选购,市场需求较为旺盛,而不少创业者也被该行业所蕴藏的巨大发展商机所吸引,纷纷萌生了加盟的想法,并向小编咨询开个50平的小超市多少钱,下面就与小编一起来深入了解一下吧,开个50平的小超市多少钱市面上的超市品牌层出不穷,且品牌实力的不同决定了其在加盟费方面的差异性,创业...。
