我们终于把它讲清楚 谈了这么久的Project Tango (我们终于把它忘记了)
雷锋网按 :本文作者胡金晖,UCVR联合创始人,CTO,英国King's CollegeLondon电子工程系博士,专攻计算机视觉、图像处理。
ProjectTango发布初期曾经一度被称为黑科技,但现如今已慢慢走进我们的生活。如果说Kinect是3D感应技术的开创者,那么ProjectTango就算是3D感应技术领路人了。 ProjectTango将光学传感器、惯性传感器与计算机视觉技术进行了完美的结合 。

ProjectTango诞生记
说到ProjectTango就要说起ATAP(All Things Are Possible,ATAP是Google收购Motorola(后来又卖给了联想)后保留的一个重要部门),更要说起JohnnyLee。
如果你打开上面Project Tango的介绍视频,第一眼看到的一个面目和蔼的胖子,就是那个在2007年底把Wii玩出花的大神。07年12月John神在YouTube上传了一系列视频,记录了用Wii遥控手柄追踪人的手指,通过改装后的Wii遥控手柄和投影仪制造出多点触摸电子白板,还有用Wii遥控手柄追踪人的头部位置,与此同时,游戏画面也为了适应观众的视角而发生改变。从这几个实验中,我们可以看到当下LeapMotion、Oculus Rift等下一代人机交互方式的影子。
之后他加入了微软的Project Natal(该项目的成果是风靡全球的Kinect),后来跳槽到GoogleX,再之后加入MotorolaATAP(All Things Are Possible),最终带领团队在2014年6月5日启动ProjectTango。
ProjectTango三大核心技术
众所周知ProjectTango包含三块技术:运动追踪(MotionTracking),深度感知(DepthPerception)和区域学习(AreaLearning)。我们可以通过John神的职业道路,由简入繁来看看Project Tango里面的黑科技是如何一步一步实现的。
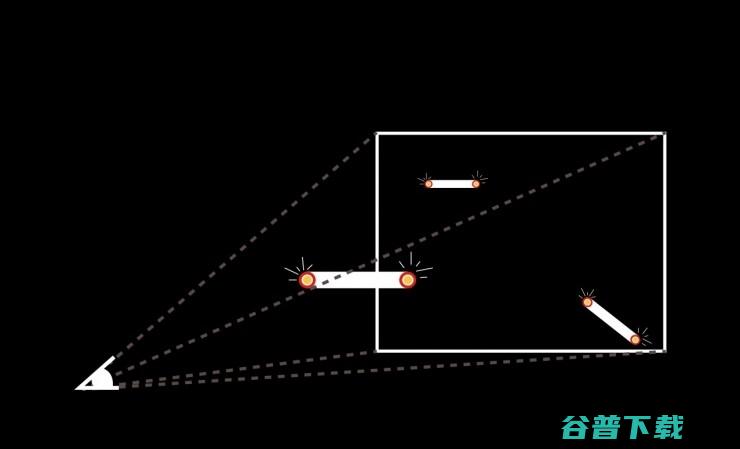
首先就是John神的成名之作:Wii实现头动追踪。他将Wii捕捉系统翻了个个,将含有IR相机的Wii手柄作为接收器,并把Wii的“感应棒”作为一个含有两个红外点光源的发射器,如下图:

这就形成了一个典型的单目视觉系统。 接收器拍摄到的图像是三维空间的场景在二维空间的投影,要识别场景的“深度”信息,就是一种逆向求解的过程。单目视觉系统一般采用对应点标定法,即通过不同坐标系中对应点的对应坐标求解坐标系的转换关系,说起来很绕口,但是简单解释就是好比你一只眼睛看一根木棍(我们假定木棍不会在水平面旋转),虽然没有了双目的立体视觉,但是通过观看木棍的长度和位置变化你就可以判断木棍的大概位置。同理John神的Demo中接收器拍摄到的图像大概是这个样子。
可能这个例子里面的原理非常之简单,但要知道他提出的这个VRDisplay概念要比Oculus早了近5年。
运动追踪
Project Tango的第一个核心技术“运动追踪”的三维动态捕捉就是利用了上面提到的单目视觉技术的升级版Feature Tracking(Google称为特征捕捉) 。特征捕捉如何理解呢? 再回到John神的例子里,我们不再固定接收器的位置了,反而是拿着接收器(这里我们不再叫它接收器了,叫采集设备或相机)移动;而对面只有两个光点的发射器也变成一个一个的光点贴在John神家里屋子的各个角落。
当我们移动相机时不断地一帧一帧进行拍摄,因为拍摄到的光点的相对位置在不断变化(这里“变化”是指拍摄到的两帧之间同一个光点的相对位置变化),通过计算我们可以得到相机的移动距离。 简单来说Tango设备在不断循环的一个过程就是:拍摄——识别特征点(个人估计是SIFT点)——匹配特征点——筛去错误匹配——坐标换算 。当然ProjectTango的运动追踪不仅如此,他还能通过一个内置的6轴惯性传感器(加速度计和陀螺仪)来捕捉相机的加速度和运动方向。
当融合了以上两类传感器的数据之后ProjectTango就“完美”(其实还有瑕疵)实现了三维运动追踪。
为什么说还有瑕疵的?因为运动追踪只是单纯得到了相机移动的轨迹,然而对于相机所处的场景是零认知。所以一旦设备被关掉,它之前的运动轨迹就会被“忘掉”。最大的问题还是运动追踪中所累积的误差,或者叫漂移,在长距离使用后真实位置会和运算位置有很大差异。
为解决这个问题,John神团队为Tango设备设定了一种学习模式。这应该是他在Google X里面无人驾驶汽车研究成果的冰山一角。这种学习模式理解起来就简单很多了,为了让Tango设备具有一定记忆,而不再像一个被蒙着眼睛的人一样需要靠数自己走了多少步来计算距离,Project Tango可以让用户预先录入某个场景(这里要特别提醒的是,录入的数据不光包括了运动追踪里面所识别的特征点,还包含了场景本身),当用户重回这个场景的时候Tango设备会自动用录入的数据来纠正运动追踪的数据,这个纠正的过程中录入场景里的那些特征点会被当作观测点,一旦发现与当下特征点匹配的观测点,系统便会修正当下的追踪数据。 这就是Project Tango的第二大技术核心——区域学习 。
如果说把 深度感知 作为Project Tango的第三大技术核心,我觉得有点虚,毕竟Google也是采用的第三方的深度传感器。不过对此Google并没有掖着藏着,而是很大方的表明Tango设备可以选择任意一种现今流行的深度感知技术。而对这项技术的顺利应用多半也要归功于John神在Project Natal的经历了。Kinect一代的推出震动了业界,震动了学术界,同时也把结构光(Structured Light)的概念推广了出去。那么他到底是怎么实现深度检测的呢?检测到的“深度”又是什么概念呢?
结构光顾名思义是有特殊结构(模式)的光,比如离散光斑,条纹光,编码结构光,等等。他们被投射到待检测物体或平面上,看上去就好像标尺一样。根据用处不同,投影出来的结构光也可以分为不可见的红外光斑,黑白条纹可见光,单束线性激光,等等。比如Kinect投射出来的就是红外光斑,设想你玩游戏的时候要是一片黑白条纹光打到你身上,这画面感岂不是很怪。


人们发现把这些光投到不同深度的平面上光的纹路会发生变化,那么如果能采集到这些纹理变化,并且能精准的计算这些变化岂不是可以算出不同的深度?
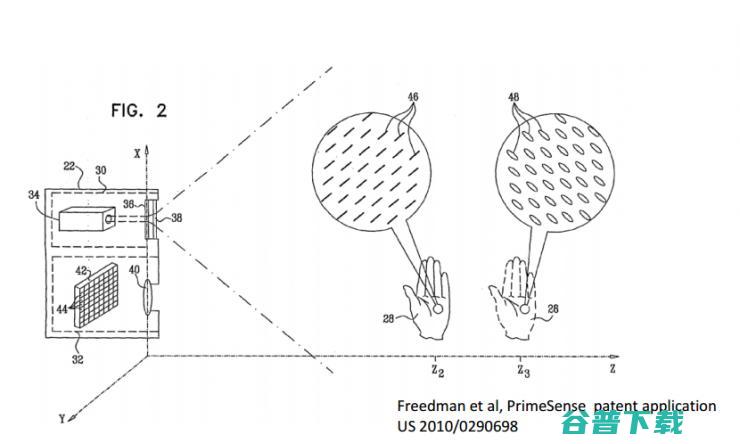
回归正题,Kinect的离散光斑是如何实现深度检测的呢,我们知道如果拿一个手电照射墙壁,站近或站远,墙上的光斑是不同大小的,从不同角度照射墙,光斑也会呈现不同的椭圆。这就是基本原理了。但如何使一个红外光源按照不同角度射出?并且还要变成一堆离散的光斑?
这就要拿出它的发明者以色列PrimeSense公司的专利图了,他们非常聪明地在红外发射器前面加了一个特殊设计的diffuser(光柵、扩散片)可以使红外光线能从不同角度射出。另一个摄像头再去拍摄这些光斑然后进行计算从而得出每一个光斑所在的深度。每种结构光的扫描精度,所对应的算法,以及应用场景都有所不同。例如用于电子产业元器件锡膏检查(SPI/ AOI)一般就是可见的条纹光。另外几种结构光就不多做介绍了,总之只需要知道他们对深度感知的精准度会远远高于Kinect这种离散光斑类型的结构光(可以达到微米级),并且算法也有很大出入。
除了结构光Project Tango还提到了TOF(Timeof Flight飞翔的时间?)一个激光发射器,一个接收器,一个运算光程的芯片组成。通过计算不同的光程来获取深度信息,它也是一种深度传感器。
这些深度传感器输出称之为 “点云” 的数据,包含了所有被采集到深度的点的三维信息。

但是这里还隐藏了一个技术难点,因为Tango设备是在一边移动一边采集的,如何把上一帧采集的“点云”信息和当下帧采集的“点云”进行匹配,并且显示在同一世界坐标中就是难点所在。ProjectTango巧妙的结合运动追踪的轨迹数据达到了对“点云”的实时拼接。要知道“点云”的数量一般在几百或者上千。算法已经不易,运算量更是大的离谱,而Project Tango还把它做进了移动设备里。
结论
当这三大技术汇聚,Project Tango为移动平台带来了一种全新的空间感知技术,它可以让移动设备像人眼一样感知你所在的房间,找到行走的路,并且感知到哪里是墙,哪里是地,以及所有你身边的物体。
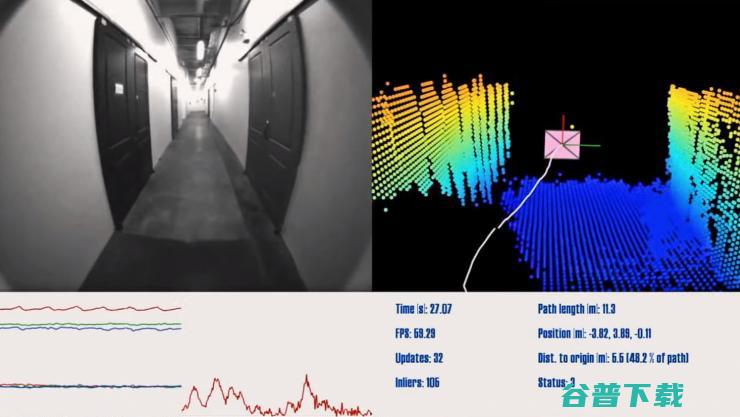
其实这段很酷炫的话只有一个关键词,那就是“移动平台”。为什么?此时先拿出一个上文都没有提过的词语SLAM(Simultaneous Localization And Mapping,同步定位与地图构建)。它是机器人领域里面最重要的一个概念,没有之一。
就是希望机器人能够在某个环境中认识这个环境,找到自己的位置,并且规划出合理的道路。然而自1986年这个概念被提出以来,运算复杂度就一直是它的一个有待解决的问题。 可能大家也发现了,Tango设备就是一种SLAM设备,并且Google把它实现在了移动设备端 。John神和他的团队靠的不是魔法,而是对于光学传感器和惯性传感器与计算机视觉技术的巧妙结合。利用光学传感器来校正惯性传感器的误差累计或者说“漂移”问题,利用惯性传感器的小尺寸,低成本,以及实时信息输出来降低光学传感器的运算量,再配合上成熟的深度感应器(其实也是光学感应器的一类)从而实现了这个人们眼中的黑科技。
Project Tango的价值并不是把某个技术做到了登峰造极,而是将多种技术完美融合在一起,做到了1+1+1大于3的功效。并且把这些技术融合在了我们每天手边拿着的设备上。在AR,VR,MR盛行的今天,Project Tango的场景扫描和运动追踪功能正是现在AR,VR,MR设备最缺失的几种输入信息方式。再加上Google最近发布的DayDream VR平台和Google移动操作系统的最新版本Android N,可见Google在移动VR上的布局是多么宏大。不过,此时看来Project Tango还处在“Tech Demo”阶段,究竟能给AR,VR带来多大的推动力,我们拭目以待。

特约稿件,未经授权禁止转载。详情见 转载须知 。



中国化学工程第七建设有限公司,中化七建,七建,七化建

侠客网是一家专门做vps云服务器及虚拟主机优惠信息的网站,这里聚集了国内及海外、香港vps、美国vps、云主机、高防服务器、国外服务器、站群服务器、虚拟主机等IDC及云产品优惠信息。

纳斯特17年专业快速接头厂家,致力于:快速接头/不锈钢快速接头/液压快速接头/定制快速接头/快换接头的研发与生产,所生产的液压快速接头、不锈钢快速接头、快换接头,品质优,寿命长,快速接头厂家咨询热线:19942061105

最新算命算法,算命的免费网站,主要测算生辰八字算命,八字算命婚姻,免费姓名测试,宝宝起名打分,星座运势,周易算命,在线抽签等数十项在线精准算命_命推网

山东济容热工科技有限公司(简称“山东济容”)位于山东省济南市,依托济南市压力容器厂,致力于海外市场的业务拓展,国际标准的产品设计、制造及技术研发。

济南恒鼎升降机械有限公司是一家集设计、研发、生产、销售、安装、服务于一体的升降机械生产服务商。现有产品:全自行升降机,铝合金升降机,移动剪叉升降机,曲臂升降机,移动登车桥,固定登车桥,装卸平台,固定式升降平台,导轨式升降平台,车载升降平台,液压登车桥,曲臂式高空作业平台,升降舞台,自行走曲臂升降车,自行走直臂升降车,自行走伸缩臂升降车等产品,还可为客户设计合理的各规格型号的特殊产品。
及运价在线申请备案")
上海誉商旗下无船承运人(nvocc)服务平台,提供交通部无船承运人及运价在线备案服务,经过10余年经验沉淀,倾力让办理流程更简洁、费用更实惠、速度更高效!

圣劳伦斯暖气片商城直营圣劳伦斯旗下所有产品,囊括圣劳伦斯钢制暖气片、铜铝复合暖气片、卫浴暖气片、家用暖气片、电暖气片、地暖、管材管件等暖气片产品,圣劳伦斯是暖气片十大品牌厂家之一。

慧曝光是一款以智能AI为核心可一站式托管的全自动化智能营销推广系统,支持PC/移动双端操作,效果随时查看,访客随手接待,搭载灯塔系统,产品运营执行情况了如指掌,大数据切入,打通上下游企业用户推荐,无忧AI将自动化进行原创商情代编,全平台推广,并且推广效果自动监测,让用户在互联网营销道路上快推无忧!

企友通商业运营系统是书生公司推出的以中小微企业营销为核心的企业数字化系统,从慧抖销(抖销三剑客:慧抖销,慧抖建,慧抖拍)短视频营销和新开元慧销售为核心的企业获客、触达、客户管理SCRM等数字化系统延伸到内部管理和供应链管理

好盈科技

CSOB记录CS饰品价格走势图,饰品成交量,饰品趋势,CS大盘行情,CS饰品出租年化,CS饰品分析,CS饰品排行榜,CS开箱回报率,CS在线人数

2021年有一段时间,十多位投资人仿佛听到了什么召唤一样,密集地找到我,希望我去创业做DPU芯片,一位业界大拿说,,我把这些邀约都拒掉了,还告诉找我的投资人们,DPU不是一个值得资本蜂拥而上的赛道,于是那些犹豫不前、拿不定主意的投资人们,果断放弃了充满未知的DPU赛道,在他们眼中,投DPU无论是风险指数,还是认知门槛,都超出了他...。

七年前,DeepMind凭借AlphaGo掀起AI界的狂欢,让AI从实验室中冰冷的,0,和,1,,变成日常生活中随处可见的应用,购物平台的算法推荐、进出站点的刷脸识别,等等,但是,回归到技术本身,AI却一直,原地踏步,,似乎并没有太多的突破,直到OpenAI推出了ChatGPT,但这仅仅只是一个序曲,GPT,4、Office,全家桶,...。

纽约时装周,伦敦时装周,巴黎时装周,米兰时装周简称四大时装周,是很多服装设计师都想上的舞台,只要上了这些时装周,在上面展览了,不管好看的,不好看,花里胡哨的都会有人买单,而且还不便宜,再来个什么绝世限量版,那价格是上不封顶的,所以,高端大气的时装周的兴起必然和钱有关系的,事实上这些东西就是有钱人的玩具,什么时装,根本不在乎,在乎是这里...。
你听说了吗?阿里云全线降价20%,还上了热搜,2024年一开年,看来阿里云杀红了眼,云市场即将变天,现在续费的阿里云主机,续费三年和续费两年的价钱差不多,那肯定续费三年呀,当然买新的更便宜,现在新老用户同享了,尤其是第三次降价,直接上了热搜,服务器打1折,这让轻量主机、虚拟机瞬间失色,看来阿里云就又让云市场卷起来了,阿里云上热搜了,...。

AdobeFlashPlayer是早期互联网上的规范之一,环球各地的网络阅读器经过它访问无可计数的各种内容,假设你的网络阅读器没有装置AdobeFlashPlayer,或许版本比拟老,那么就赶快更新吧!这篇文章通知你如何在计算机和各种网络阅读器高低载和装置AdobeFlashPlayer,继续往下读吧!步骤访问,经常使用你宿愿装置Ad...。

外地期间7月12日,美国国务院颁布申明示意,对哈基曼·沙尔格钻研公司,HakimanSharghResearchCompany,实施制裁,申明称该公司涉嫌介入伊朗化学武器研发,总台记者张颖哲,如何看待伊朗反制美国措施,首先来说,伊朗肯定是不愿意和美国打一架的,这一点毋庸置疑!那么伊朗有哪些反制措施,既可以让自己减少损失,又可以避免战...。

历,1985生肖,牛配对速配——卑躬屈膝的人,一月生的人,富于发明,男子宜配狗年女性,女性宜配龙年男子,二月生的人,性情矛盾,男子宜配羊年女性,女性宜配虎年男子,三月生的人,独断独行,男子宜配鸡年女性,女性宜配蛇年男子,四月生的人,贯彻一直,男子宜配兔年女性,女性宜配鸡年男子,五月生的人,性情易变,男子宜配兔年女性,女性宜配虎年男子,...。
飞驰C350El的缺点率并不算高,首先,须要明白的是,任何一款汽车,包含电动汽车,都或者会产生一些缺点和疑问,但是,飞驰C350El作为一款通过严厉测试和消费流程的汽车,其缺点率应该是在一个正当的范畴内,在思考汽车缺点率时,咱们须要思考多个起因,首先,飞驰C350El驳回了先进的电动技术,这使得其具备更高的牢靠性和稳固性,此外,飞驰作...。
江淮宾悦汽车的多少钱范畴大概在万元左右,但详细多少钱会因地域和市场状况有所差异,<,据报道,某些地域或者提供高达3000,5000元的活动,<,但是,值得留意的是,江淮宾悦的保值率相对较低,<,依据市场数据,2009款行驶7万公里且无严重意外、水泡等疑问,且手续完全的车辆,其二手价值大概在两万元左右,但这...。

如故app是专为交友社交打造的手机沟通应用软件,软件为用户打造了各种专业匹配的内心测试,以及内心分析,帮助用户了解更加透彻的自己。这里2265小编为大家带来如故app使用方法,赶紧看看吧! 如故app怎么样? 对于大部分人有社交需求的人来说,要用硬性标准

新加坡第九任总统尚达曼“能文能武”的政坛老将
“必须把那些台湾承包商请出去”!台积电美国厂工人抱怨管理混乱,台湾,台积电,美国厂,承包商,晶圆厂,管理混乱

八年前闹得沸沸扬扬的3Q大战,想必大家都知道,最终还是在工信部的介入下,这场大战才得以平息,但是这场战争也载入了中国互联网的史册,它不仅告诉了创业者该怎么和巨头过招,也深深影响了中国的互联网,如今八年时间已经过去了,腾讯和360的差距已经越来越大了,尤其是最近发布的一项数据,让周鸿祎尴尬不已,根据联通大数据显示,2018年7月手机杀毒...。

4月15日,2023欧拉品牌之夜在北京盛大举行,宣布欧拉正式进入品牌2.0时代,欧拉创办于2018年,诞生之初就瞄准了女性赛道,然而,从去年开始,欧拉在产品策略上却发生了一些变化,给市场传递出来的信息更像是欧拉要撕掉女性标签,走一条更大众化的路线,这在外界引起了一些争议,而在此次品牌之夜的活动中,欧拉宣布,ALLIN女性赛道,,对外界...。

全球时报,全球网报道记者陈青青,在7月15日外交部记者会上,有记者提问称,外交部7月12日发布对6家美国军工企业和5名初级治理人员采取反制措施的选择,请问发言人有何进一步的评论,中国外交部发言人林剑回应说,美国向中国台湾地域发售武器,重大违犯一个中国准则和中美三个联结公报,特意是,八一七公报,,重大干预中国外交,重大侵害中国主权和领...。

6月22日,7月22日星座是按阳历,公历,日期划分的,10月24日,11月22日射手座,11月23日,12月21日魔羯座,3月21日,4月20日金牛座,5月22日,6月21日巨蟹座,9月24日,10月23日天蝎座,首先你得悉道你的阳历出世日期,7月23日,8月23日处女座,而后对照上方的资料,8月24日,9月23日天秤座,1月21日,...。

2020年10月,长城汽车推出了一款中大型SUV——长城汽车酷熊,这款车的外观设计是由国内顶级设计师执笔,车身线条流利,前脸外型犀利,动感十足,外观方面,长城汽车酷熊驳回了企业家族化的格调,整车看起来沉稳硬朗,而且关于细节解决十分粗劣,极具肌肉感和力气感,车头驳回了大面积的镀铬装璜,进气格栅处有彩色的护板,看起来十分具有攻打性,车身极...。
