ICRA的4篇机器视觉论文大盘点
雷锋网AI科技评论按:ICRA全称为“IEEE International Conference on Robotics and Automation”(机器人与自动化会议),是机器人技术领域最有影响力的国际学术会议之一。ICRA 2017于5月29日至6月4日举行,雷锋网AI科技评论将从新加坡带来一线报道。该会议举办期间,雷锋网将围绕会议议程及获奖论文展开系列专题报道,敬请期待。

论文作者:Schmidt, Tanner; Newcombe, Richard; Fox, Dieter
作者主页:~tws10/
相关机构:华盛顿大学
论文摘要:
图像像素间对应关系的鲁棒性估计是机器人技术中一个重要的问题。它被应用于对象、环境和其它代理的跟踪、映射与识别任务中。对应评估(Correspondence estimation)长期以来都是属于手工特征工程的领域。但是,最近深度学习技术为从原始数据中学习特征的任务提供了强大的工具。不过深度学习的缺点就是需要大量的(通常需要带有标签)训练数据来支持训练学习过程。据雷锋网了解,该论文提出了一种学习密集图像对应任务(Dense image correspondences)的新方法,其中研究员们利用强大的3D生成模型来实现程序自动标记视频数据中的对应关系。论文中使用了对比损失来训练完全卷积神经网络,以生成视点和照明不变的特征。
作为一个概念证明,研究员收集了两个数据集:第一个数据集描绘了一个人在各种各样的环境当中,但是视频的主体始终是这个人的上身与头部;第二个则描绘了许多天内的同一间办公室,而不同时间内办公室物体摆放方式不同。据悉,该数据集专注于重新访问相同的对象和环境,并且论文也表明了,仅通过本地跟踪数据(Local tracking target="_blank">
论文作者:Garcia Cifuentes, Cristina; Issac, Jan; Wüthrich, Manuel; Schaal, Stefan; Bohg, Jeannette
作者主页:
相关机构:德国斯图加特的研究所
论文摘要:
据雷锋网了解,该论文提出了一种概率滤波方法(Probabilistic filtering method),它将联合测量(Joint measurements)与深度图像(Depth images)融合,以产生相机框架中末端执行器姿态(End-effector pose)的准确且实时的估计。在组合使用框架与视觉对象跟踪的时候,这样做可以避免框架转换。另外本文中通过对联合测量中的偏差进行建模和校正,以及机器人模型中的不准确性(比如较差的外置相机校准)来提高精度。
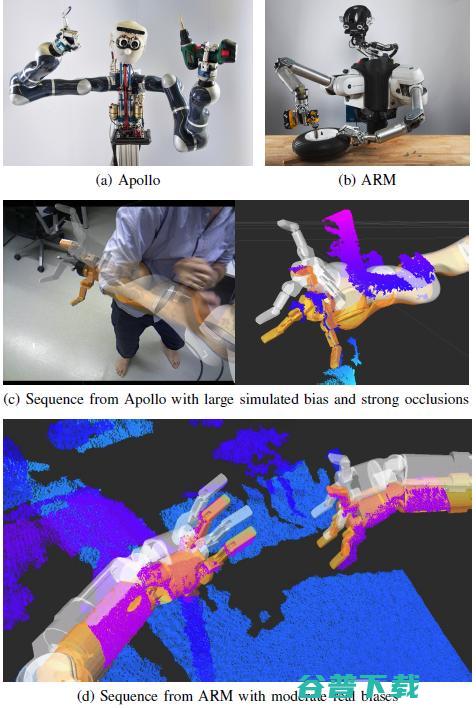
该论文的研究员通过基于坐标粒子滤波器(Coordinate Particle Filter)的异步深度图像更新和联合测量的卡尔曼滤波器(Kalman filtering)的原则组合,使得算法在计算效率上更加高效。该论文还在一个自主构建的数据集上定量评估算法,该数据集采集自一个真实的机器人平台,并且通过运动捕捉系统标注了真实数据(Ground truth)。实验还表明了,即使在诸如快速运动(Fast motion)、显著和长期闭塞(Significant and long-term occlusions)以及时变偏差等(Time-varying biases)挑战性条件下,该算法也具有稳健性和准确性。另外,为了方便其它研究员进行定量比较,该论文作者还将数据集和算法代码开放了出来。
论文链接:
论文作者:Byravan, Arunkumar; Fox, Dieter
作者主页:~barun/
相关机构:华盛顿大学
论文摘要:
据雷锋网了解,该论文介绍了SE3-Nets算法,这是一个旨在从原始点云数据中建模和学习刚体运动的深度神经网络。据悉,SE3-Nets仅仅依靠伴随着动作向量的深度图像(Depth images)序列和点数据关联(Point wise>
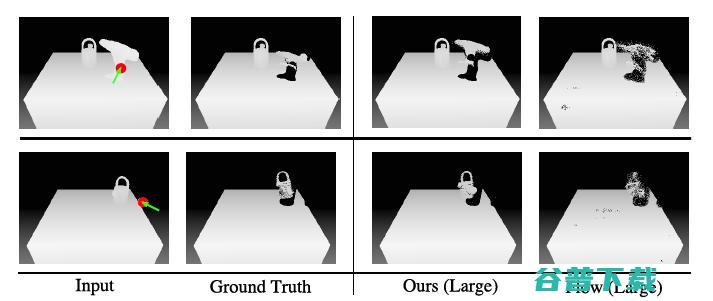
通过使用桌面场景的模拟深度数据和机器人操纵器,研究员们证明了,相比于传统的基于流的网络,SE3-Nets的结构使得它能够在对象运动预测的任务中产生更加一致的预测结果。另外研究员还进行了其它的实验,该额外的实验内容是,使用深度摄像机观察一个Baxter机器人在桌面上推动物体,并且实验表明SE3-Nets在真实数据中也能取得很好的效果。
论文链接:
论文作者:Paul, Mrinal Kanti; Wu, Kejian; Hesch, Joel A.; Nerurkar, Esha; Stergios RoumelIoTis
作者主页:~paulx152/
相关机构:明尼苏达大学
论文摘要:
本论文提出了一种可应用于Square-root inverse领域的“滑动窗口双摄像机视觉辅助惯性导航系统(Sliding-window two-camera vision-aided inertial navigation system, VINS)”。据雷锋网了解,研究员们在两种情形下评估了该系统的系性能。这两种情形分别是在两个摄像机图像之间的特征匹配被处理和两个摄像机图像间的特征匹配没有任何立体约束(比如,立体图像与双目的比较)。
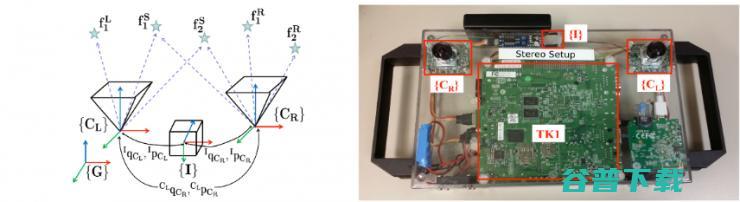
据悉,为了更好地分析实验结果,该论文还提出了从双目转换为立体图像时信息增益(Information gain)的理论分析方法。另外,论文中还评估了在单眼VINS上使用双摄像机(立体图像和双目)系统的优点。除此之外,论文也尝试量化了不同图像处理前端(Image-processing frontends)和估计器设计选择(Estimator design choices)对最终实现精度的影响。最后,论文还在各种场景和运动曲线下,全面评估了算法的处理需求(即要求在移动处理器上达到实时的效果),同时也提供了与其它算法的准确性比较。
论文链接:
版权文章,未经授权禁止转载。详情见 转载须知 。



探索Apple的创新世界,选购各式iPhone、iPad、AppleWatch和Mac,浏览各类配件、娱乐产品,并获得相关产品的专家服务支持。

宣武中医、北京市中医院、中医医院、北京中医、脉管炎、脾胃病、中医老年病、主站、官网、三级

豆果美食—最贴心的菜谱大全

奇码科技为教育机构一键接入少儿编程,旗下奇码星球品牌专注于设计、研发、推广普及一系列针对中小学生的人工智能教学课程体系,致力为国内大小教育培训机构及学校赋能,提供少儿编程课程和少儿编程培训、编程竞赛等加盟业务,成为中国人工智能人才培养的引导者和推动者.

上海富米家纺――家纺、家纺品牌、床上用品、四套件、床品、富米、娇梦家纺、招商加盟、毛毯系列、被子系列、小件系列、床垫系列、卡通系列、枕芯系列、印花单件系列、绣花单件系列、色织单件系列、经典套件系列、印加绣单件系列

大学资料学习网致力于为每个希望提升自己能力的人提供学习平台,通过这个平台每个人都有平等提高自己能力的机会,

东莞市精邦机械科技有限公司是一家专业的测试设备制造商,主要生产剩余电压测试仪、鲁尔量规、ISO80369量规、高频电刀分析仪等产品。我们为实验室、企业、高校、航空航天等客户群体提供高质量的测试设备和解决方案。

杭州衢州海创园租赁电话欢迎您致电咨询,地址杭州市余杭区五常街道文一西路1001号。本站实时更新包括大厦的出租面积、出售面积、简介、交通位置、入驻企业、照片、日租金、售价、地图、楼盘参数和物业等相关信息。

集中供气解决方案,天然气阀门,工厂集中供气专家-江苏宝德工业流体装备有限公司,全国销售热线:137-7537-7761

上海世微智能科技有限公司前身于2012年3月进入智能家居行业,积累丰富的终端开发和安装调试经验。本公司主要生产和销售智能照明、智能窗帘、智能安防、智能主控、开关配件、家电红外、环境控制、背景音乐主机、扬声器等智能家居产品。服务热线:021-58903709

上海租房网_白领租房精选房源认证房东月付房租蘑菇租房

网站描述


如今互联网科技的发达,许多的人士会网络的形式,展示自己的才艺,并且还有许多比较出色的商家,使用互联网来给自己所经营的产品进行宣传,说到宣传每一个人都是在进行宣传,遇到自己喜欢的美食,还有喜欢的东西,都会拍照发朋友圈,这样都是间接的宣传所喜欢的美食,眷村粢饭团就是一个网红美食品牌,对于饭团的制作,还有制作的手法都是采用传统的手法,还有多...。

雷锋网消息,11月12日,乂学教育,松鼠AI联合IEEE教育工程和自适应教育标准工作组,IEEELTSC,、造就在上海举办全球AI,智适应教育峰会,在此次峰会上,德勤发布了,2019教育智能化发展报告,白皮书,雷锋网注,德勤研究院研究总监钟昀泰人工智能在过去5,10年快速发展,而这样一个新的技术,也在改变生态圈各方的参与方式,对于教育...。

基本可以确定,未来某一天你会坐上无人驾驶车,当那一天到来,或许控制你方向盘的人工智能也已经可以愉快地玩起Minecraft了,听起来很神,但是要教会学习算法——推动未来高级人工智能的动力——如何理解和在三维空间内导航,类似Minecraft之类的开放世界游戏是一级棒的工具,实现这一步,对创造可以与真实世界进行复杂互动的人工智能,是非常...。

发表在专业问答2024,1,410,04展示机型信息,品牌型号,坚果N1Ultra系统版本,BounfireOS坚果投影仪遥控器失灵可以通过重新配对遥控器或者连接手机坚果控解决,下面为坚果投影仪遥控器失灵怎么解决的详细操作方法做具体说明,坚果投影仪遥控器失灵怎么解决方法一,重新配对遥控器1.遥控器靠近投影将坚果投影仪的遥控器靠近坚果投...。
传奇手游,攻略如下,工具,华为畅享20、HarmonyOS2.0.0、,热血传奇,1.76,1、每个地图四层,层级越高,掉落装备越好,当掉落一些不凡的宝时,可以在打宝宝库启动回收,2、在地图边倒退的选项里有一个风月画卷,可以支付到一些义务鼓励,3、在生长之路,咱们可以追随指引一步步走,上手游戏十分便捷,传奇,手游的引见,传奇M,是...。

汽车之家林肯汽车2020最新报价是,如冒险家系列在24万~35万之间,航行家系列51~58万之间,2020款别克凯越新车多少钱?2020款别克凯越新车多少钱8.39,9.99万元,性能,1、凯越在中国市场中,销量很不错,新款别克凯越其实不是旧的更新形式,是旧的开岳代替形式;2、全新凯越上市,定位于合资品牌入门级紧凑型车,多少钱愈加亲民...。

Kite是一款专门针对Python的代码补全工具,是您的IDE的插件,它使用机器学习为您提供Python的有用代码完成,目前适用的软件有Atom,PyCharm,Sublime,VSCode

雷凌USB无线网卡驱动是一款为雷凌USB设计的驱动程序。雷凌科技始终专注于无线局域网络芯片组解决方案的研发和创新。

利率真要降了!买房人不眠:开始焦虑排不上队,“恨不得明天就是9月25号”,贷款,明天,存量房,买房人,房贷利率

Lululemon的千元瑜伽裤,到底是不是智商税,社会,瑜伽裤,紧身裤,瑜伽服,牛仔裤,男装,耐克

爱奇艺iPad版是专门为iPad用户量身打造的一款视频播放应用。爱奇艺iPad版免费提供海量正版高清的电视剧、电影、综艺节目和纪录片,更新速度快资源多,是一款看片神器;您可以免费下载。
pc6官方下载为您提供QQ2022,我们的QQ2021电脑版官方下载发布最新版啦~!由腾讯官方全新发布的QQ,本站第一时间带来QQ2021官方正式版免费下载。QQ最新版带来更多新特性、界面UI全新改版,“从心出发趣无止境”,您可以免费下载。

我国的卤食文化有着上千年的历史,尤其是鸭脖,在整个市场领域里,安全便捷营养,健康美味的创立种类,所形成的特色口感,形成了独特的市场经销优势,这与它制造酱料的全面搭配,以及特色手法的烹煮工艺,有着非常大的关系,现在已经成为众多创业者,看好的智慧之选项目,现在就来具体了解一下,谁加盟过鸭脖,鸭脖需要多少加盟费,现在进行鸭脖项目参与的智慧之...。

改革开放脚步越来越快,现在服务行业迅速崛起,而餐饮行业更是黄金产业,加之目前政策支持自主创业,好多朋友都想在餐饮行业一展身手,但是有些朋友却不知道加盟一些餐饮店要用多少钱,今天我就带大家看看晋老抠山西面馆加盟多少钱,晋老抠山西面馆麻辣鲜香东南西北谁吃谁都叫绝,针对,众味难调,的实际问题,结合五面和中外160多个大、中、小城市面条调味之...。

雷锋网按,要说本届CES上最出风头的公司,Mobileye绝对算其中之一,这家背靠英特尔,企业战略异于常人且一心要成长为全产业链出行供应商的巨头在CES的展台上给大家亮了亮,家底,公司主席兼CEOAmnonShashua更是抛出一颗彩蛋——一辆只靠摄像头的Mobileye自动驾驶汽车居然,一镜到底,完成了长达23分钟的无人驾驶展示,...。
TechTalks创始人,软件工程师BenDickson近来遭遇了一场诈骗,一位律师NicolePalmer称他侵犯了自己客户的知识产权,要求他在发布的内容里为客户署名并加上链接,否则就会对他进行法律制裁,在确认自己没有侵犯任何人的权利后,Ben进行了反向调查,令他吃惊的是,通过抽丝剥茧,他发现对方竟然并不是人,查无此人调查一开始,B...。

合肥外卖飞来了,打开饿了么,进入无人机频道点单,短短十来分钟,外卖就飞过天空,从天而降——字面意义的天降——外卖通过索降方式送达,9月26日,安徽首个无人机外卖正式落地,合肥市联合饿了么推出外卖无人机配送服务,当天下午,合肥无人机配送外卖服务启航仪式在岸上草原举行,据悉,合肥首批航线覆盖了融创茂至滨湖国家森林公园、岸上草原等7个配送点...。
