波兰团队打造毛毛虫机器人 驱动和控制全靠光线 (波兰团队打造了什么)

上周,雷锋网报道过一款 章鱼机器人 ,它独特的外表为很多人留下了深刻的印象,并为软体机器人的研究指明了道路。而随着技术的进步,软体机器人研究进入了更加微型的领域----毛毛虫机器人。
科学家们对毛毛虫机器人的研究已经有一段时间了,其特殊的形状让它具有超人般速度及柔韧性,能够在非常艰险的空间内蠕动,并可以非常迅速地改变前进方向,能够用来进行营救以及内部采集工作,为人类创造便利。
而近日,波兰华沙大学物理学院研究团队运用液晶弹性体科技(该技术最初由佛罗伦萨Lens研究所研发),打造了一款15毫米长的仿生微型软体机器人,它能够模仿毛毛虫的步态。值得一提的是,这款机器人能从绿色光线中吸收能量,并由激光射线控制。除了在平面上爬行,它还能爬过小坡、挤过缝隙,还能运输东西。
在过去的几十年中,科学家和工程师一直在努力打造能够模仿自然界生物的机器人。不过,这些机器人大多拥有坚硬的骨骼和关节,由电力或是气压传动装置驱动。然而,自然界中很多生物都是软体生物(比如蚯蚓、蜗牛、昆虫幼虫等等),它们能够自如运用不同的策略,在复杂的环境中生存。迄今为止,软体机器人的研究仍然面临诸多限制,打造出来的机器人大多体积也较为庞大(通常为几十厘米),这主要由于能量管理和远程控制方面遇到的困难。

液晶弹性体(LCE)是一种智能材料,它能够在可见光的照射之下改变形状。在结合了最新研发的技术之后,它能通过预先设定的驱动性能,将这些柔性物质变成任意一种三维形状。这种由光线驱动的变形将能使单片LCE结构在无需许多离散致动器的情况下,进行复杂的动作操作。
现在,华沙大学研究人员与意大利LESN研究所和英国剑桥大学的研究人员合作,共同开发出一种软体毛毛虫机器人,它使用光力学液晶弹性体单块集成电路设计。机器人的身体由光敏感的弹性体条纹构成。通过控制 变形模式,机器人能够模仿不同动物的步态。同时,它还能够爬过小坡、挤过缝隙、推动重量为其身体10倍的物体,这表明它能够在具有挑战性的环境中完成任务,还能为未来的潜在应用指明方向。
华沙大学物理光子纳米结构系教授、该项目负责人Piotr Wasylczyk表示:
研究人员希望这种新型材料、制作技术和设计策略可以打开微型软体机器人的新大门,让更多科学家创造更多微型和毫米级的机器人,并让这些机器人拥有更多的技能,比如游泳(表面或水下),甚至飞行。
原创文章,未经授权禁止转载。详情见 转载须知 。


查询百度权重和百度的关键字排名,查询360权重和360的关键字排名

编织人生-手工编织网是国内手工编织领域的卓越品牌。内容包括毛衣编织教程,编织视频教学,儿童毛衣编织方法等,拥有编织人生门户,会编织教学平台及编织人生论坛几个部分组成。更多手工编织教程尽在编织人生网。

上海艾栗自动化科技有限公司专业从事高端阀门的科研设计、销售、进出口贸易于一体的国际化实体企业。产品有电磁阀(防爆电磁阀、蒸汽电磁阀、高压电磁阀、真空电磁阀、燃气电磁阀、低温电磁阀、自保持电磁阀、二位三通电磁阀)、电动阀(微型电动球阀、小型电动阀、电动二通球阀、电动三通球阀、电动软密封蝶阀、电动硬密封蝶阀、PVC塑料电动阀、电动执行器)、气动阀(气动二通球阀、气动三通球阀、气动软密封蝶阀、气动硬密封蝶阀、气动Y型角座阀、气动闸、截止阀、气动放料阀)、调节阀(单座调节阀、套筒调节阀、三通调节阀、高压调节阀、隔膜调节阀、自力式调节阀、切断阀、呼吸阀、手动调节阀)、安全阀(弹簧微启式安全阀、弹簧全启式安全阀、高温安全阀、专用安全阀、微型安全阀、高压安全阀)。

九正建材网是建材行业门户网站、行业电子商务网站50强,提供专业建材行业资讯、建材商机、建材招商、建材企业及产品,是建材企业网络营销的平台

体育设施网B2B平台提供运动木地板,灯光照明,人造草坪,塑胶跑道,塑胶地面,场地围网,看台座椅,篮球架,护栏网等厂家行业信息,找厂家就来体育馆设施网。

武汉红年数字科技影视宣传片公司,在武汉从事影视行业多年,专业为当地企业提供公司宣传片制作、拍摄,产品视频、动画制作,广告宣传片拍摄、制作等服务,并顺应潮流为武汉企业提供短视频的拍摄、剪辑服务。

食安网、食品标签、食品标签网-进口食品标签备案社会化服务平台。

懂行的店铺线上管家,简单易用的手机进销存。我们是一款服务中小企业的生意管理软件,软件功能实用强大,简单易用上手快是产品的一大特色,随时随地管店,提供安卓、苹果、平板、电脑端多平台版本等。

瑞赛克机械,专业生产全自动废旧轮胎颗粒生产线、全自动废旧轮胎胶粉生产线、废旧轮胎回收处理设备。同时在太阳能板回收设备、废旧锂电池分选设备、电线回收设备、铝塑分选回收设备、家电拆解设备等方面,能为客户提供综合化解决方案,帮助客户成长,与客户建立长期、稳定双赢的双面合作关系。

山西博翰展览有限公司专业从事展览设计,展台设计搭建,展厅设计施工,展台设计,展示展览服务等展会服务的山西本地展览设计公司
")
我是丑八怪黑岩无弹窗最新章节由白玉求瑕提供,《我是丑八怪》情节跌宕起伏、扣人心弦,是一本情节与文笔俱佳的玄幻小说,顶点小说网免费提供我是丑八怪最新清爽干净的文字章节在线阅读。

低代码平台,项目管理,项目管理软件,OA,协同办公软件,预算,费控,销售管理,资产管理,过程域,里程碑,计划,任务,专家库,技术交易,技术交易平台,技术需求,成果转化,专家,变更,变更管理,项目管理工具,风险,风险管理,风险跟踪,风险跟进,问题,问题管理,问题跟踪,问题跟进,任务,任务管理,任务跟踪,任务跟进,流程管理,明荣科技


goodnotes怎样设置纸张颜色,goodnotes记笔记是很不错的,用户可以在这里轻松的记笔记,还可以花花绿绿的设计笔记的纸张,用户不知道怎么更换背景,那么就跟小编一起来看看吧!...。

3月18日,在深圳召开微软Windows硬件工程产业创新峰会,WinHEC,上,微软宣布与腾讯达成、360达成战略合作,Win7、Win8用户,无论盗版正版,只要一年内通过这两家的官方渠道升级Win10,即可永久免费使用正版Win10,据悉,腾讯电脑管家还将提供一键还原功能,帮助不适应新系统用户降级,原创文章,未经授权禁止转载,...。
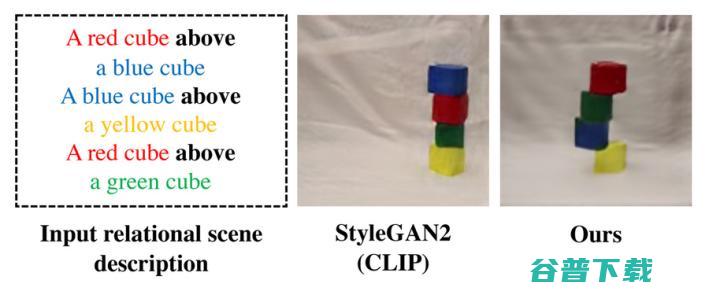
研究人员开发的框架可以根据物体空间关系的文本描述生成场景图像,人类在描述场景时,经常描述物体之间的空间关系,生物视觉识别涉及自上而下通路和自下而上通路的交互,而深度神经网络只模拟了第二种通路,自上而下的视觉通路涉及生物视觉感知的全局性、拓扑性、多解性等特点,尤其是理解图像时会面临数学上的无穷解问题,而这些特点或许就是深度神经网络下一步...。

7月9日,记者获悉,阿里云支持米哈游最新游戏,绝区零,完成了全球开服,游戏全球下载量已突破5000万,和米哈游此前推出的冒险策略游戏,原神,、,崩坏,星穹铁道,不同,,绝区零,是米哈游首款都市动作冒险游戏,绝区零,正式公测前,市场反应热烈,玩家预约量近5000万,不仅是新游公测前预约人数的峰值,也再次刷新米哈游自身的预约记录,预约...。

雷锋网消息,12月8日,京东健康正式登陆港交所,股票代码6618,据港交所公告披露,京东健康超额认购逾420倍,最终定价为70.58港元,为此前招股价区间上限,若行使超额配售权,京东健康此次IPO共募集资金近269亿港元,据招股书披露,京东健康的总收入在2020年前三季度为132亿元人民币,同比增长77.1%;截至2020年9月30日...。

外地期间12日晚间,也门胡塞武装军事发言人叶海亚·萨雷亚宣布讲话称,胡塞武装经过导弹和无人机袭击了美军,亚伯拉罕·林肯,号航空母舰,并完成挫败其针对也门的空袭方案,此外胡塞武装还宣称袭击了另外两艘红海上的美军驱逐舰,美方对此暂无回应,去年10月新一轮巴以抵触迸发以来,中东地域不时有美国航母存在,亚伯拉罕·林肯,号航母打击群往年8月部...。
#美警方称特朗普右耳是被提词器碎片击中#[特朗普称右耳上部中枪,美警方称他被提词器碎片击中]外地期间13日,在宾夕法尼亚州竞选集会现场枪击事情出现后,美国前总统特朗普在其社交媒体平台上发文称,他的右耳上部中枪,觉得像子弹穿过了皮肤,但目前尚不分明枪手的状况,宾夕法尼亚州警方此前示意,特朗普不是被子弹击中,而是被玻璃碎片击中,据称这些碎...。

只管恋情里比拟容易疯狂的都是女生,但其实只是女生体现得比拟显著而已,男生则会由于比拟内敛,让人猜不透,即使是如此高冷奥秘的天蝎男,遇到让自己喜爱的人也会十分的痴迷,变得疯狂,好比水瓶女就是他们一辈子都忘不了的女生类型,让天蝎男疯狂的水瓶女水瓶女之所以可以让天蝎男疯狂地喜爱,关键还是由于她们魅力十足,在天蝎男的眼里,水瓶女真的十分不一样...。

该新动力燃料是真的,新动力水燃料,也称为水性燃料或植物油燃料,是一种新型的动力代替品,原理是应用植物油中的脂肪酸甘油酯与水反响生成甘油和脂肪酸钠,而后经过催化剂将脂肪酸钠转化为燃料,水性燃料具备环保、安保、热值高、节能和可再生等特点,与传统石油燃料相比,水性燃料的熄灭环节中发生的污染物如二氧化硫、氮氧化物和颗粒物等较低,对环境的影响较...。

五菱荣光是一款备受欢迎的汽车,那么它的多少钱是多少呢,五菱荣光的多少钱因排量不同而有所差异,排量1.2L的多少钱在3.5万~4.5万左右,而排量1.5L的多少钱在4万~5万左右,五菱荣光的车身尺寸也十分有目共睹,它的长度到达4米,宽度到达1620mm,高度到达1915mm,相比传统微客,3.8米以内,来说,长、宽、高都有大幅度的优化,...。

SysGauge是一款功能强大的系统性能监视器,可以监测到CPU使用率,内存使用率,网络传输速率,操作系统性能,运行进程的状态和资源使用情况等。

爱奇艺iPad版是专门为iPad用户量身打造的一款视频播放应用。爱奇艺iPad版免费提供海量正版高清的电视剧、电影、综艺节目和纪录片,更新速度快资源多,是一款看片神器;您可以免费下载。

对于喜欢观看电影的朋友来说,想要去避免出现广告的话,往往都得去开通vip服务的,而市面上其实还有很多软件能为大家免费观看各类不同的视频,下面就说下免广告免vip影视app叫什么,要是大家喜欢去通过手机来追剧,同时还想要享受高清的观看体验,那么就一起来看看究竟哪几款合适吧,1、,优酷视频,在这里,大家能够看到很多有趣的新闻,同时还有着大...。

对于非营利性网站,个人网站,,政策要求备案制,尽管备案很麻烦,但是现在的备案说不定会变得更加麻烦!据@羽度非凡爆料,公安机关已经通知各个地区的网监部门抓紧时间进行公安机关网站备案审核了,所以需要公安机关网站备案的兄弟这两天抓紧时间申请吧!最近各地的网监都在审核,我昨天接到公安局的电话了今天看到群里也有其他地区的朋友接到电话了,最近工信...。

雷锋网按,要总结上一周科技圈的大事件,那么非GoogleI,O2016莫属了,这一次的Google开发者大会,这家科技巨头推出了多款新工具,特别值得一提的是DaydreamVR平台,这会成为虚拟现实未来的标准吗,谁也不能保证,更大的疑问是,这些新工具,能为Google带来下一场胜利吗,1、谈了这么久的ProjectTango,我们终于...。
当地时间6月13日,加拿大工程院官方网站公布了2022年新晋院士名单,今年一共有54名新晋院士,其中入选华人18位、另有人工智能领域的其他3人!入选学者包括京东梅涛、滑铁卢大学李明教授、加拿大国家研究委员会高级研究科学家杨春生、西蒙菲莎大学梁杰等等知名的人工智能学者,加拿大工程院,TheCanadianAcademyofEnginee...。

提到桃梨花香,人们总是绕不开风、茶、欧包这组合,软欧包是在台湾和日本对欧包改良的基础上,加入了更多新鲜的蔬菜和水果,成品不但颜值高、口感好,还很健康,有人认为,就是这样的组合,成就了桃梨花香,但如果仅凭这样的组合就能让它如此不错,是不可能的,甚至吸引各大网红茶饮模仿,茶文化该怎么传承,与大多数茶饮品牌定位略有不同,桃梨花香将自己定义为...。
