逐际动力 推动通用足式机器人进化 港大副教授潘佳加入 首发 前文远知行COO张力
获悉,前文远知行COO张力正式加盟通用足式机器人公司「逐际动力」,成为联合创始人,并任首席运营官;与其同时加入的,还有香港大学计算机系副教授潘佳,将担任首席科学家一职。
张力曾任职思科中国长达19年,担任思科大中华区资深副总裁、CEO幕僚长等职务。2018年2月,张力加入自动驾驶公司「文远知行」,任COO,负责战略运营、市场拓展及商业化等工作。
2023年10月,张力正式加入逐际动力,成为联合创始人,担任首席运营官。
张力告诉,足式机器人经过多年的发展,已经进入到新阶段。一方面,AI大模型、视觉等技术的应用与成熟带来了软件算法的新突破;另一方面,国家政策的大力支持、资本市场的持续看好,营造了良好的市场环境。
张力表示,自动驾驶与足式机器人在许多技术和供应链上相通,比如导航定位、路径规划、零部件制造、生产线等,足式机器人技术不仅和自动驾驶互补,并且落地场景相对可控,已经具备商业化落地条件。足式机器人可能是汽车行业未来的一个新的增长点。
在逐际动力,张力将主要负责海内外业务的战略规划、渠道拓展和项目落地, 以及工业巡检、汽车制造、物流配送等行业的业务拓展和商业化,有望为足式机器人行业的商业模式带来创新和启发。
潘佳本科毕业于清华大学自动化系,获美国北卡罗莱纳大学教堂山分校计算机系博士学位。博士后期间,潘佳在加州大学伯克利分校电子计算机系从事机器学习与机器人相关的研究,现任香港大学计算机系长聘副教授。
据悉,潘佳是最早将深度强化学习、自然语言处理等方法成功应用在移动机器人感知与动态避障问题的学者之一,其开发的机器人碰撞检测和距离计算库 FCL(Flexible Collision Library)和参与开发的机器人运动规划库 TrajOpt、ITOMP 等基于 CPU 和 GPU 的轨迹优化方法在机器人领域广泛应用。
潘佳认为,人形是释放足式机器人从底层运动控制的学习,到上层AI技术的应用的最佳通用系统。机器人越通用,越适用于采集可泛化数据,产生越大的价值,这些恰恰也反哺了AI技术在足式机器人上的发展,是人形机器人在不久的将来成为真正的生产力工具的必经之路。
加入逐际动力后, 潘佳将担任首席科学家,负责为逐际动力提供前沿 AI 技术在通用足式机器人上的研究和应用转化, 例如增强机器人在复杂场景理解、自主任务分解、运动规划和优化等方面的上层能力,推动通用足式机器人从运动智能向具身智能的迭代进化。
逐际动力创始人张巍表示, 当前,通用足式机器人正处于技术与商业化交集不断扩大的重要时间节点。 张、潘两人将在商业化和前沿 AI 技术攻关方面提供助力,从而推动逐际动力的技术攻关和商业化进程。
长期关注机器人赛道,如你有好的观点、项目,欢迎添加作者微信nanshu0126互通有无。
原创文章,未经授权禁止转载。详情见 转载须知 。


360汽车频道,聚合全网知名汽车网址及新闻资讯,包括汽车图片,汽车行情,汽车评测等资讯,是服务于汽车爱好者及购车人群的汽车资讯网站。

云上黔南官网-云上公司注册,简称云上黔南官网-云上公司注册,是互联网线上虚拟园区,通过互联网的办法提供线下园区几乎所有的配套服务。除电子营业执照办理外,还能提供政策申报与兑现、线上培训、引导基金等服务。

比兔是功能全面的淘宝卖家工具箱:旺旺号打标、照妖镜验号、查黑号,免费淘宝信誉查询、小号验号、旺旺查号、骗子微信QQ标记及查询、淘客订单检测、生意参谋指数还原、实时查排名、卡首屏、买家秀采集等多个黑科技,是专业的淘宝小号打标、验号、查号的大数据平台!

七六网是生活百科网站,主要分享生活百科知识等
企业管理咨询有限公司")
顾彼思勇于挑战引领变革,帮助中国企业走向世界,帮助海外企业立足中国。提供企业管理咨询、经营能力测评、经营战略管理、人力资源管理等企业培训服务。

惠州之家,为惠州发展提供先驱动力!惠州之家分类信息网,为你提供房产、招聘、黄页、团购、交友、二手、宠物、车辆、周边游等海量分类信息,充分满足您免费查看/发布信息的需求。为用户提供本地房屋租售、招聘求职、便民查询等信息服务以及吃喝玩乐、购房购车等消费指南

深圳市博力机械有限公司总部成立于2010年,是一家专业从事自动化设备研发、生产、销售、服务于一体的现代化国家高新技术企业。公司主要产品有微电脑切管机,微电脑裁切机、微电脑剥线扭线机、单双头全自动端子机、超声波高速切唛机、无纺布横切机、走刀式分板

湖北龙剑建筑装饰工程有限公司是一家集建筑、市政、钢构、装饰、设计、施工为一体,以家具软装为辅的大型建筑装饰集团。,热线电话:13997749150。

串词网:一个专业的报幕词,主持词,开场白等串词文案创作网站,找主持人串词,歌词,文案,范文,素材,软文欢迎到串词网。

【上海海奥水族工程】专注大型鱼缸定做,海洋馆设计,水族工程,大型亚克力鱼缸,亚克力游泳池生产制造和海洋馆设计,海洋馆施工建造等水族工程服务.另公司主营海洋馆的整体设计规划,以及海洋馆的设计施工建造等业务,海奥水族馆会为您打造一套完美的水族新科技.

江苏蒙建建设有限公司成立于2017年,是一家集拆除,房建,装修,市政,机电,环保,石油化工等一体的综合性建筑企业。公司位于国家级新区-南京江北新区的丽景智星大厦,注册资金8000万元。


2023训练反应力的游戏有哪些,现在市面上的游戏可以说是五花八门,看的人眼花缭乱,当然有很多游戏,还是蛮考验玩家的反应速度的,如果一不留神的话,就直接会失败,这种玩起来还是蛮刺激的,今天小编也整理了几款可以锻炼反应速度的游戏,希望大家会喜欢,1、,不休的音符,在这款游戏里面,玩家需要根据音符,掉落到合适的位置的时候,然后手指立马按下去...。

抓娃娃游戏是很多人都比较喜欢的,比如在现实的生活中,只需要操控机械爪,就能够轻松地抓住娃娃,那你是否知道在很多的小游戏中也能有机会去抓娃娃,可以让大家感受到不一样的体验,如果玩家对这些游戏有兴趣,不如就关注下面的这几款,能够有机会轻松的抓到娃娃,1、,街机娃娃机,在游戏中就可以感受抓娃娃的趣味性,就好像一下子进入到街机厅一样,可以给大...。

一、抖音矩阵的四种常见玩法从一个热门账号发展成为多个不同定位的矩阵号,似乎是一条提升影响力的必经之路,从最近几期,抖音达人粉丝增幅榜,来看,很多账号运用大号带小号,通过客串、评论区互动等方式,实现粉丝互通,最大限度地发挥了矩阵效应,并在短期内快速涨粉,研究了已发布的8期榜单后,我观察到四种比较常见的抖音矩阵玩法,1.独立的抖音号之间互...。

雷锋网按,光鲜亮丽的投行工作看似有着羡煞旁人的超高回报,但在几百页,金融文档,的日常重压之下,会被瞬间秒回原形,在中国计算机学会,CCF,主办,雷锋网与香港中文大学,深圳,承办的CCF,GAIR2017的第二天,中科院计算所副研究员、微信人工智能首席科学顾问、博士生导师罗平教授带来了题为,人工智能在智能投行中的应用,的分享,讲解了如何...。

京东金融AI实验室AI影响因子论文京东雷锋网AI科技评论消息,京东金融城市计算事业部的一篇论文被人工智能领域国际顶级学术会议IJCAI2018录用,其主要作者被邀请于会议上进行口头报告和海报展示,这一事项在雷锋网学术频道AI科技评论数据库项目,AI影响因子,中有相应加分,京东金融与清华大学的这篇录用论文,GeoMAN,Multi,le...。
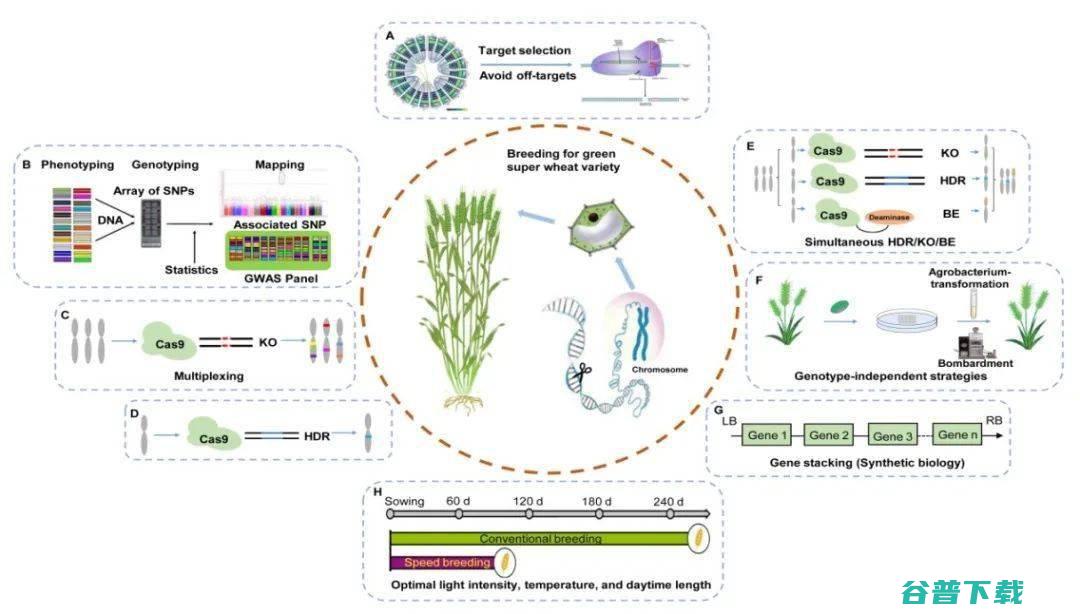
雷锋网消息,近日,西湖云谷智药,杭州,基因科技宣布完成数千万元天使轮融资,由高榕资本投资,本轮融资主要用于加速公司人工智能技术在基因编辑治疗领域的发展,推动公司CRISPR疗法核心研发平台的搭建,围绕基因编辑治疗,西湖云谷正开展以高通量Biotech数据产出与深度学习模型建立相迭代的前沿技术开发,并搭建原创技术驱动的基因编辑疗法开发平...。

关于,颐达和西风日产骐达怎样选哪个更值得入手,这个疑问,咱们可以从多方面启动比拟,以便更好地选用适宜自己的车型,首先,从外观上看,骐达和颐达是同一平台的车型,但外观格调不同,骐达是一款两厢车,而颐达是一款三厢车,车身尺寸方面,骐达为4393*1766*1524,而颐达为4631*1760*1503,假设您更器重外观和车身尺寸,可以依...。

此花亭奇谭动漫女生头像动漫此花亭奇谭女生头像女生头像此花亭奇谭动漫女生头像此花亭奇谭动漫女生头像此花亭奇谭动漫女生头像此花亭奇谭动漫女生头像此花亭奇谭动漫女生头像此花亭奇谭动漫女生头像此花亭奇谭动漫女生头像此花亭奇谭动漫女生头像末日空袭游戏简介末日空袭是一款模拟经营养成类手机游戏末日来袭建设国家...

纵横小说电脑版是一款电脑小说阅读软件,能够为用户提供各种小说资源,随时随地在线阅读,软件中有着海量的小说资源

植物大战僵尸花园战争2中文版变成了类似于《兽人必须死》的第三人称射击类防御型游戏,僵尸类型众多,有疯狂尖叫的逗比僵尸
痛点,痛点如何,什么痛点,哪些痛点,怎么痛点

欢迎来到pc6,我们有提供360手机助手、快用、同步助手、刷机大师等手机辅助软件教程,手机刷机教程、手机越狱、手机同步教程等其他技巧与资讯

学习的方式有很多,当前互联网发展相当迅速,很多人会合理利用学习软件,根据每个学生不同的情况及需求,制定个性化学习方案,而且整体的互动性极强,便捷性极高,不受时间地点限制,只要有网络连接,可在任何地点完成学习,给学生提供更多的机会,作为多媒体学习app,其中所提供的内容也是相当全面的生动形象地展现出知识点,今天为大家推荐几款完全免费的学...。

在数字营销领域,广告联盟已成为一种广泛应用的商业模式,随着游戏行业的崛起,游戏营销广告联盟也逐渐成为推动游戏推广和增加收入的重要手段,然而,游戏营销广告联盟能否打破传统广告模式,成为未来营销的主流方式,本文将从多个角度分析这一问题,并通过具体案例加以说明,什么是游戏营销广告联盟,游戏营销广告联盟是指由多个广告主和广告发布平台组成的联盟...。

4月18日,,腾讯文档,打开想象,2024产品发布会在线上举办,腾讯社交协作产品部总经理、腾讯文档负责人鄢贤卿在会上,正式发布智能白板创新品类、双核编辑,开物引擎,、云加端解决方案等产品矩阵,他表示,在自研文档品类和自研双核引擎的基座下,腾讯文档也全面搭载了AI助手,致力于打造专业、智能的Office产品体验,提升用户和企业生产力,同...。

发表在专业问答2023,2,1310,28展示机型信息,品牌型号,iPhone14、华为mate40系统版本,iOS16.1、鸿蒙OS2.0软件版本,爱奇艺13.12.6爱奇艺能电视投屏,爱奇艺投屏电视需要将移动设备和电视连接到同一无线网络中,然后打开电视上的投屏软件,接着在移动设备上通过爱奇艺的投屏功能或移动设备的屏幕镜像功能连接电...。

发表在投影固件2022,4,1615,24极米RSPro2是极米相对较为高端的智能家用投影仪,所搭载的系统同样也是极米INUI,如果系统出现故障就需要进行修复,修复的方法可以是恢复出厂设置,也可以是刷机,如果能够正常开机使用,系统故障并不影响开机和遥控,可以选择恢复出厂设置,如果已无法开机,那就需要进行刷机修复了,下面一起看看极米RS...。
