Finn团队推出BID新算法 Chelsea 家务机器人或将再更新 机器人一键变聪明 (fine团队)
斯坦福大学的 Chelsea Finn 团队又出新成果了。
Chelsea Finn 团队一直是斯坦福走在具身智能研究前沿的团队之一,之前火遍全网的 ALOHA 炒菜机器人就是出自这个团队之手。团队领头人 Chelsea Finn 的创业公司 Pi 更是创立不到一个月就拿下来自红杉资本、OpenAI 等公司的7000万美元融资。
最近,Chelsea Finn 团队在研究中发现,虽然延长动作块能够提升策略捕捉时间依赖性的能力,但这样做会减少对机器人近期状态的观察,导致在随机环境中更容易出错。
为了克服这个难题,他们开发了一种双向解码(Bidirectional Decoding, BID)新型算法。BID 能将动作块化与闭环操作相结合,通过在每个时间步采样多个预测并寻找最优化的一个,增强扩展序列的时间一致性,同时在随机环境中实现自适应重新规划。
为了验证 BID 算法的效果,他们在 Franka Kitchen 数据集上进行了模拟测试,发现机器人在家庭环境中的表现还不错。他们还用 Franka Panda 机器人做了真实实验,结果显示 BID 显著提高了机器人在目标移动时的放置成功率。
这些测试不由得让人联想到了他们之前做的炒菜机器人,也许这个团队正计划把 BID 应用在 ALOHA 上,准备给家务机器人来个全面的技术升级。
值得一提的是,这个团队中有一半都是华人面孔,之前开发 ALOHA 的也全是华人学生。
目前,论文已在arXiv公开,相关代码也已开源。
论文标题:Bidirectional Decoding:Improving Action Chunking via Closed-Loop ReSampling
论文地址:
项目网站:
代码地址:
论文概览
研究问题
本文旨在解决机器人学习中的挑战,特别关注动作分块,即在没有中间重新规划的情况下预测和执行动作序列的过程,这些序列通常来源于人类示范。面临的挑战包括在捕捉时间依赖性与对随机环境中意外变化的反应之间的权衡,以及不同示范之间的风格变异性较大。
该研究的动机在于通过对动作分块进行更深入的分析和提供实用的解码算法,来增强机器人系统的学习和执行过程。所要解决的问题包括:
动作分块中时间依赖性与反应性之间的权衡
不同示范之间的风格变异性较大
需要一种实用的解码算法以提升机器人行为克隆的性能。
提出的方法
本文提出了双向解码(BID)方法。
BID 是一种推理算法,将动作分块与机器人学习中的闭环操作相结合。它在每个时间步采样多个预测,并基于向后一致性(与先前决策的对齐)和向前对比(与更强策略的结果的接近度)来优化选择。
这种综合方法增强了长动作序列的时间一致性,同时保持了适应动态环境变化的灵活性。BID在各种机器人任务中显著优于现有的闭环方法,代表了机器人系统学习和执行过程的重大改进。
实验与结果
数据集
本文在三个数据集上进行了实验:Push-T、RoboMimic 和 Franka Kitchen。

对于Push-T数据集,本文在七个任务上评估了所提出的双向解码(BID)算法,包括将物体放入人类手持的杯子中。实验中使用的机器人是Franka Panda,配备了两台相机,提供256 x 256像素分辨率的视觉观察。本文还评估了BID在大批量和现有推理方法下的可扩展性和兼容性。
对于RoboMimic数据集,本文使用了五个任务,即Lift、Can、Square、Transport和Tool Hang。每个任务的训练数据集包含300个从多个人类展示中收集的回合。
对于Franka Kitchen数据集,本文在涉及四个或更多物体的测试案例上评估了学习到的策略,这是一个具有挑战性但在家庭环境中实际应用的机器人操作任务。
真实世界实验
本文还通过两项现实世界实验进一步评估了提出的 BID。
动态放置实验
他们共收集了150个展示回合,包括50个干净且一致的展示和100个嘈杂且多样的展示。实验中使用的机器人是 Franka Panda,并采用基于视觉的扩散策略进行操作。
机器人的任务是将其抓手中的物体送入人类手中的杯子中。每次展示包括四个主要阶段:(a) 随机初始化机器人位置,(b) 接近目标杯子,(c) 在目标杯子附近减速,(d) 释放物品。目标杯子的位置可能会在展示过程中发生变化。
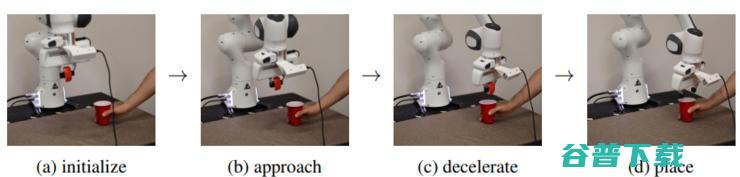
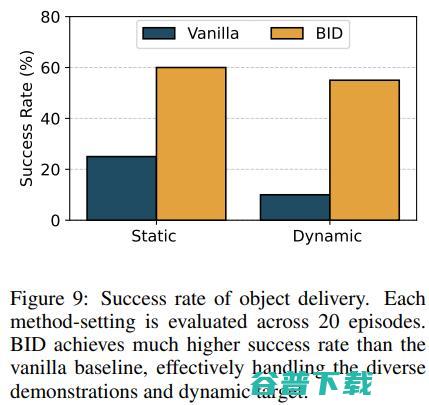
值得注意的是,BID 在动态设置中的成功率与静态设置相似,这表明它有可能将动作块扩展到不确定环境中。
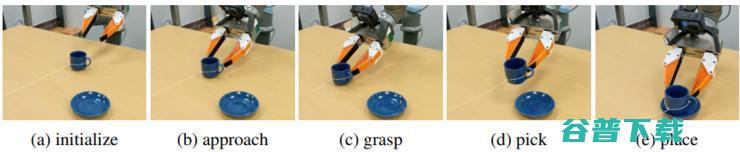
动态拾取实验
本文评估了不同方法的性能,包括普通的开环和闭环采样、BID 的开环和闭环采样,以及 EMA 的闭环采样。
机器人的任务是拿起一个杯子,并将其放在附近的碟子上。四个主要阶段是:(a) 初始化机器人,(b) 接近目标杯子,(c) 抓住目标杯子,(d) 拿起杯子,(e) 将杯子放到目标碟子上。目标杯子的位置可能会在一个过程中发生变化。
结果表明,在动态环境中,相比其他方法,BID 的成功率至少提高了2倍,同时在静态环境中保持了其性能。
BID技术解读
动作分块有利于对展示中的时间依赖性建模,但却牺牲了对随机环境中意外状态的反应能力。他们选择通过闭环操作衔接长的动作块来解决这一问题。
他们的主要假设是,虽然任何一对样本共享相同潜在策略的概率很低,但从大量样本中找到一致的一对样本的可能性要高得多。这种直觉促使他们将闭环动作分块问题理解为在每个时间步采样的一批计划中寻找最优动作。
其中 ? 是动作块集合,ℒ? 和 ℒ? (B和F都是下标,飞书文档打不出来)是两个衡量时间依赖性的标准,接下来将会详细描述这两个标准。
ℒ指的是逆向一致性。
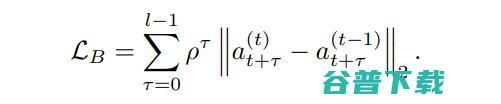
这里,ρ 是一个衰减超参数,用于解释不确定性随时间增长而增加的情况。这种后向损失鼓励相邻步骤之间采用类似的潜在策略,同时允许逐步适应不可预见的过渡动态。
指的是正向对比度。

其中 ?+=?∖{?} 是强策略 ? 预测的正集合,?− 是弱策略 ?′ 预测的负集合,而 ? 是样本大小。
下图展示了逆向一致性和正向对比度标准对样本选择的影响。
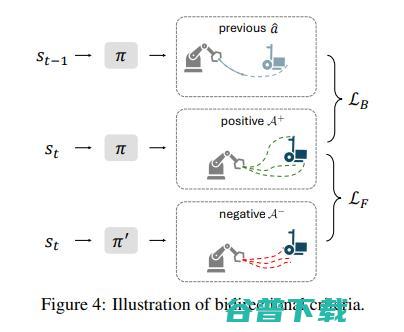
由于 BID 中的所有步骤都可以并行计算,因此在现代 GPU 设备上,总体计算成本仍然适中。
团队介绍
Chelsea Finn

Chelsea Finn 博士毕业于加州大学伯克利分校,师从Sergey Levine。她曾在 Google DeepMind 工作过 6 年,现在担任斯坦福大学计算机科学与电子工程系的助理教授,也是 Pi 的联合创始人。
Chelsea Finn 的研究兴趣是机器人和其他代理通过学习和交互发展广泛智能行为的能力。她的实验室 IRIS 专注研究大规模机器人交互智能,隶属于 SAIL 和 ML Group。
团队其他三位华人学生包括:
Yuejiang Liu

Yuejiang Liu 是 IRIS 实验室的博士后,博士毕业于瑞士洛桑联邦理工学院。他专注于研究自监督学习、因果表征学习和测试时间适应,并将其应用于计算机视觉和多代理系统。

Annie Xie 毕业于加州大学伯克利分校,曾在伯克利人工智能研究 (BAIR)实验室和 Sergey Levine 一起工作,现在是 Chelsea Finn 指导的博士生。她的研究重点是开发在最少人工监督下学习的机器人系统。
Maximilian Du

Maximilian Du 今年学士毕业于斯坦福大学,主修计算机科学、心理学(辅修)和创意写作(辅修),在 Chelsea Finn 的 IRIS 实验室从事机器人学习工作,现在是 Chelsea Finn 即将入学的博士生。
版权文章,未经授权禁止转载。详情见 转载须知 。



广州市麦谷科技有限公司是一家专业致力于企业信息化全方面应用服务的互联网企业,主营项目有广州网站建设,广州网络推广,整站优化,超级流量宝,SEM竞价包年,广州短视频运营,广州小程序APP定制开发,400电话等服务。

威士登国际香精香料

25导航网(25dh.com)是汇集全网优质网址及资源的中文上网导航。及时收录影视、音乐、小说、游戏等分类的网址和内容,让您的网络生活更简单精彩。上网,从25导航网开始。

深圳亿豪物联技术有限公司

江苏苏州智淼探测器清洗厂家主营:进口火灾探测器清洗,国产烟感清洗,超声波清洗,消防设备维修清洗,光电、等离子探测器清洗,清洗服务热线:4006-598-119,18910580194

北京时间现在几点几分几秒?北京时间网告诉你!为您提供现在北京时间校对,农历查询,现在中国标准时间,当前北京时间校准对时等时钟服务。

有限公司")
智能眼镜,远程协助,远程售后,远程专家,手机单兵,手机对讲,集群对讲,4G单兵,5G单兵,指挥调度,应急指挥,AR,中科启航

柏士达电源公司创建于2016年,是一批拥有20多年专业UPS经验的专业人事组建而成。主导产品BODAYN柏达昱能UPS,逆变器,稳压电源、电力工业级UPS、变压器和定制特殊机型等。功率容量分别覆盖1--720KVA,拥有百余种型号和规格。

业界动态,图文资讯,游戏前瞻,游戏评测

上海佳武自动化科技有限公司,佳武工控商城,工控自动化产品,B2B2C一站式采购平台,集国内外众多自动化优秀品牌厂家、代理商、分销商,全球互联,正品保障,安全交易,为您提供最优最全的产品。

微微软件园是一个专业的软件下载门户,提供最新的安卓手游及应用下载服务。用户可以轻松找到热门手游、应用排行榜和全面的手机游戏大全,满足各类手机用户的需求。我们致力于为您提供安全、快捷的软件下载体验。欢迎访问微微软件园,开启您的手机应用探索之旅!


搜索引擎认为,如果你的网站富有价值,其它网站会提及你;对你提及越多,说明价值越大,由此引申出链接广度,LinkPopularity,在搜索引擎优化中的重要地位,1,搜索引擎目录中的链接以及已加入目录的网站的链接2,与你的主题相关或互补的网站3,PR值不低于4的网站4,流量大、知名度高、频繁更新的重要网站,如搜索引擎新闻源,5,具有很少...。

面食餐饮一直都是很多消费者青睐的选择,在国内有着很多出色发展的面食餐饮品牌,以国内不同地区的特色面食产品面向消费者,说到冷面相信很多人都比较的熟悉了,七八冷面以延边朝鲜特色冷面美食面向顾客,在产品方面吸引了很多消费者的眼球,获得了诸多消费者的喜爱,七八冷面在业内有着出色的品牌发展,面向全国诸多地区进行加盟招商合作,那么,七八冷面味道如...。

知乎回应平台存在儿童送养信息,已全面清理针对平台存在儿童送养信息一事,知乎方面表示,监测到个别用户在站内发布,送养,等可疑信息,根据我国法律规定,私自签订收养协议是违法的,也是无效的,目前已对相关违规内容进行了全面的清理,并对相关账号进行永封处置,同时,知乎也升级了安全策略,对相关新增可疑信息做主动筛查,此前法治周末报道调查发现,鲍毓...。

男装行业的市场份额在逐年增加,在此前提下,智慧之选开一家时尚男装加盟店有着广阔的发展前景,如今市场上的男装行同很多,这也让该行业的竞争日渐激烈,时尚男装加盟店通常由品牌总公司直接经营,强调集权式管理,包括商品本身、招牌、展示用品、销售人员穿着甚至服务动作等都是根据总公司的企业识别系统进行设计的,呈现出一致的感觉,通常这类时尚男装店在行...。

引子,我最近有点焦虑,,在2017年冬天的某个夜晚,我一边撸串一边和一个哥们说,哥们在美团工作,每天晚上要到九点半后才能下班,约一个串基本就在10点以后了,还不一定能约的上,哥们一边回他老板的微信一边一脸疑惑地看着我问,怎么啦?,我说前几天看到一个猎头朋友发了一个职位,觉得还挺不错的,就问了问,猎头朋友跟我说,你就算了,雇主要求35...。

[全球时报综合报道]据日本,朝日资讯,12日报道,在11日举办的日外国会众议院首相指名选举中,首相石破茂被拍到疑似在,打瞌睡,的画面,如图,当晚,内阁官房长官林芳正在记者会上回应称,据说首相今日有点感冒,吃了感冒药,而关于石破茂能否真在,打瞌睡,一事,林芳正则避而不谈,日本,读卖资讯,具体形容了过后的画面,只见石破茂闭着眼睛,低...。

提取BT种子的磁力链接可以经过一些特定的软件或在线工具来成功,首先,咱们须要了解BT种子和磁力链接的基本概念,BT种子是一种文件,蕴含了下载文件所需的一切消息,而磁力链接则是一种基于文件内容的识别码,可以用来搜查和下载文件,因此,要从BT种子中提取磁力链接,咱们须要找到一种可以将种子文件解析为磁力链接的工具,一种经常出现的方法是经常使...。

2022年上海当地车限行规则如下,一、高架限时,每天7,00,20,00,周六、周日及公休日除外,,合计13小时,二、内环中原面路线限行期间,每天7,00,9,00,17,00,19,00,周六、周日及一切市民节假日除外,,合计4小时,三、上海当地牌照限度区域,1.高架限行区域包含延安高架路、南北高架路、逸仙高架路等,2.内环低空限度...。
4岁女童在厦门大学隶属第一医院治疗因骨髓穿刺术错误致其命丧手术台依据第三方检测机构出具的司法鉴定意见书该院过失系关键要素其医疗过失在侵害结果,死亡,中的要素大小,介入度,在56%~95%之间女童父亲刘先生说,,以后,咱们需要院方直视疑问、端正态度,承当绝大局部的责任,并且踊跃处置这个事件,给孩子一个说法,给咱们一个赔罪,相关责任人也要...。

跳伞+竞速由于是从跳伞开始计时,所以落地后就需把握时间搜寻物资!起点处的物资选择很有限,拾取枪械并装配基础瞄准镜及足够的子弹后,就要尽快上车同队友展开第一赛段。
金铲铲之战神龙李青怎么玩?对于喜欢玩金铲铲之战的玩家来说能够详细了解神龙李青的游戏玩法,这里小编为玩家带来的攻略可以了解,在游戏中轻松可以掌握强大的阵容来消灭敌人,还有详细解说赶快个小编一起来看看吧! 铲铲之战神龙李青早期攻略1.早期阵容 玉龙

重庆分类目录网站收录电子地图相关的优秀网站大全分类检索,为上网用户提供电子地图网站排行榜与您分享、收藏!

农场经营的游戏是非常有趣的,因为玩法独特而受到广大玩家的喜爱,今天小编带来了2022有意思的农场类游戏推荐,小伙伴快来看看好玩的农场经营类游戏手游吧,这里小编推荐的游戏都是非常经典有趣的游戏,玩法多样有趣,小伙伴来看看是否有自己喜欢的内容吧,1、,开心农场—梦想庄园,这是一款农场经营类型的游戏,玩家可以在游戏中饲养各种牲口,还能按照自...。

继禾赛科技成功赴美上市后,又传出智加科技或将计划重启美股上市,据赛博汽车报道,智加科技计划将中国业务分拆给满帮集团,预计今年3月发布公告,满帮集团再将智加科技中国业务,并入自动驾驶卡车公司挚途科技,对此,智加科技否认了并入挚途科技的说法,但并未正面回应分拆及重启上市的问题,自图森未来受到美国政府调查,并传出分拆消息后,同样有着中美两地...。
雷锋网AI科技评论按,由中国计算机学会,CCF,主办,福州市人民政府、福州大学承办,福建师范大学、福建工程学院协办的2017中国计算机大会,CNCC2017,于今日,10.26,在福州·海峡国际会展中心正式开幕,今年大会的主题是,人工智能改变世界,AIChangestheWorld,,在上午的特邀报告环节,美国国家工程院院士、微软全...。

文字链接认证代码普通联盟标志认证代码企业广告联盟标志认证代码广告联盟评测代码说明,本页面的认证代码为运发广告联盟专用评测代码,站长需懂简单html知识,直接复制代码粘贴到联盟网站相应页面即可使用,本代码不适用于其他广告联盟网站请勿获取!文字认证,文字链接代码认证适用所有类型的广告联盟,复制代码后放在运发广告联盟网站首页底部或友情链接位...。

发表在当贝投影仪2022,2,2217,472022当贝旗舰新品F5已全网上线,这是一款亮度突破新高度的投影仪,已是LED投影仪中顶尖的存在,具体这款投影仪的实际效果如何呢,下面就随我一同来看一下当贝F5的实测效果吧,看看究竟有哪些特色,1.当贝F5外观赏析当贝F5虽说是当贝2022年的全新作品,不过整体外观还是继承了当贝F3系列的高...。
