工业机器人很危险你应该这样 抱 (工业机器人很难学吗)
编者按:随着技术的进化,制造业对工业机器人的要求也从“完成某项特定工序,简化人类操作”变成了“协同工作”,面对制造业自动化的新思维,工业机器人的风险评估也随之改变。

在最近的50年,工业机器人在全球制造业应用越来越广泛。技术一直在进化,适应用户的需要。这么多年,人们一直在研究使用机器人的安全问题。当然,意外会发生,风险评估变得至关重要。与此同时,安全标准和安全部件一直在进步。所以,我们目前在什么样的阶段呢?
当第一批机器人进入制造工厂时,行业研究了某些机器人和它们周围的设备可能对人类工人造成的危险。我们一直在从整体来看自动化。我们问自己这样的问题:
l 这个机器人动起来有多快?
l 这个机器人能跑多远?
l 机器人的操作过程危险性如何?
l 如何预防那些强力和快速的机器人撞到人类?
这些问题让用户可以进行风险评估;识别安全特性,增加到机器人中,当机器人运行时保护人类工作者。常规的措施会包括将机器人锁在安全防护栏内,预防机器人和人类之间的接触。这个过程对于进行风险评估的人来说已经很普遍。这种思维很流行,几乎是自动的。我们今天给机器人进行风险评估时还是在用这些想法。貌似我们的思维方式就是这样设定的,这貌似也是最佳的实施方式。
然后,机器人进化了,我们也该利用机器人技术的进步,适应变化。不管你是否愿意相信,协同机器人已经在市面上越来越普遍,我们必须改变我们的思维方式。我们过去在发现机器人的新应用方面非常具有创造性,现在我们进行风险评估的方式也可以更加创造性一点。我最近参加了一个关于协同机器人的会议,由合作伙伴Advanced Motion and Controls公司12月在蒙特利尔组织,这次会议改变了我对风险评估过程的想法。就像Universal Robots公司用户谈到他们在不同工厂进行的应用和风险评估,有两项引述让我印象深刻。
1、 协同机器人的风险评估不是基于“量”,而是基于“流程顺序”。
2、 对合作型流程的风险评估,不是固定死板的,而是随着时间进化的过程。
让我阐述一下这两项,解释一它们为什么改变了我对风险评估的观点。
要说合协同机器人的风险评估是基于顺序的,而不是量,意味着你改以不同的视角审视风险评估。你应该把各个方面拆开,一个个分析,而不是只顾大局,从整体上评估风险然后在每一个部分都执行。
我们来考虑以下的例子。你有一个机器人,用来把部件装载到工作台上,让人类去组装。一旦组装完成,机器人拿起组装好的部件,把它放在传送带上。
我们对付传统工业机器人的思维方式是这样的:
我有个跑得很快的机器人,可能会打伤人类。如果这种事情发生了,人类员工可能会受重伤。我需要在所有时间、所有地方防止人类和机器人有所接触。所以我一下子就想到了笼子、栏杆或者安全光幕。
机器人区域中,有两个组装区域需要人类和机器人都参与工作,但不一定是同时参与。这对于工业机器人来说是一个复杂部件。我可以用一个区域扫描,监控人类员工的位置,当人类进入某个特定区域时不让机器人进入。可能要掌控所有情况部件复杂,因为人类和机器人在一天中会有很多合作,所以在编程中,你需要考虑的不同情况非常多。
另外,你还需要一些物理或安全分隔,放置在机器人与人类合作的区域,和机器人可以高速运作的区域之间。类似安全光幕,或者感应门。你还需要在两个组装区域间安装护栏,如果你希望机器人可以进入一个区域而工人在附近区域工作。因为你不希望操作员得走5-10步才到附近的组装区域,你希望他们可以非常靠近。
另一个可能的解决办法是,让组织桌安装在一个转动装置上,可以把两个装置区域来回转动,一面在机器人区域,一面在人类工人的区域。如果我们选择这种方式,我们需要一个在转动过程中没有可能受伤的夹点的设计,我们需要考虑如果有东西卡住了该以什么事故顺序应对。因此可见,我们可以有很多不同的选项,损失时间决定哪一个选项最安全、最节省成本。
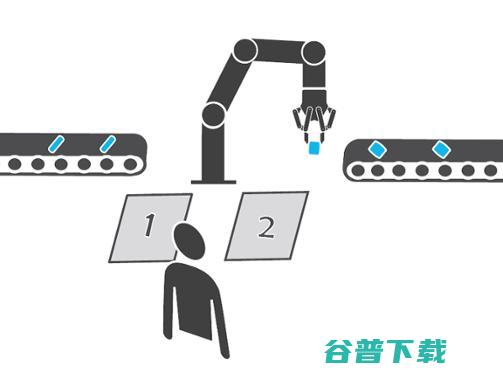
现在,有了协同机器人,设计用于与人类一起工作,基于顺序层面进行分析,而不是基于整个机器人,我们会以以下的方式操作:
机器人在挑拣部件,放置到区域1。在这个顺序中,机器人可以在任何时候与人类工人合作。因此在这部分机器人速度应该放缓,协同机器人中限制力量的功能在这时候应该启用,防止机器人意外撞击到工人造成伤害。为了研究机器人运动的安全速度,我可以用ISO15066中的方程式,新版ISO15066技术参数最近在强调这个话题。因此确定这些值更加简单了。
此时,你可能会说,当人类不在合作区域时,机器人应该运行得越快越好,减少循环时间。并不是这样的,来看看工人在机器人到来之前进行组装并把它拿起的循环时间。这会设定你机器人运动的循环时间。很可能你会有两个选项。
第一选项是全程都以安全速度运行机器人,因此没必要增加更多的安全特性了。
第二选项是你需要在过程的某些时间加快机器人的速度,来减少整体循环时间。 这种情况下,最佳解决办法是增加一个区域扫描或者光幕,可以监测到“快速操作区域”内是否有工人。同样的,协同机器人相比于工业机器人,当有人进入机器人区域的时候没必要停止机器人。你只要将机器人设置到通过ISO15066技术参数计算出来的最大速度就行了。
另一个基于顺序安全分析的例子是,当机器人需要在任务中运送一个尖锐的物件。 传统的思维方式是,因为物件很尖,机器人很可能会严重伤害到工人。但是我们来更仔细地分析一下:
机器人会在A点拿起尖锐物件,运送到B点。假设在其他步骤,机器人都没有拿着这个物件。那么问题就应该是:我如何在从A点到B点,沿某个固定方向或路径运送,让尖锐的边缘朝向运动的内侧,从而避免人被捅到或切到的危险。
另外,降低运动速度是另一个可能的解决办法。你可以只考虑和分析有潜在危险的部分,而不是想办法在所有地方都预防伤害。当然,用密码锁定这些软件很重要,防止风险评估被变更。每当机器人软件更改,你都需要审视自己的风险评估,确认变更不影响安全。 所以,这是一个不断变化的风险评估过程。
显而易见,协同机器人最初在负责工作安全的人看来,可能是一个噩梦,尤其是如果他们认为机器人的风险评估是很复杂的。但是将风险评估分解到不同的顺序步骤,知道顺序不是死板的,让整个过程变得可以管理。这也让管理层和工人相信这些机器人的安全性。改变你的思维模式,记住评估过程随着情况变化可能会改变, 这一定会让更多的人去尝试协同机器人。
另外,不用忘了,对于力受限的协同机器人进行风险评估时,例如Universal Robots,如果机器人调试到合理的力量和速度,潜在伤害的严重程度可以降低。使用协同机器人应该可以帮助你让自动化任务实现理想的性能等级(PLR)。
via RoboHub
原创文章,未经授权禁止转载。详情见 转载须知 。


第一财经商业数据中心(CBNData)隶属于上海文化广播影视集团,是国内领先的消费研究机构及数字化增长服务商。CBNData消费站整合中国最大的财经媒体集团(第一财经)优势资源,通过消费数据研究报告、数据指数、新闻、活动、视频/直播等形式丰富的数字化消费行业应用场景,面向品牌企业全面输出消费数据、行业研究、信息聚合、营销传播及商业公关等产品及服务。

厦门南洋职业学院

晋江芭比豆鞋厂主要生产批发男鞋、女鞋、童鞋;支持OEM贴牌加工,只要提供样鞋或者来图即可定制生产;给线下鞋店档口及线上各大电商平台供货源,做一家真正没有中间商赚差价的晋江鞋业源头生产厂家。

主要产品:北泽kitz、YOSHITAKE耀希达凯、瑞士BELIMO博力谋、TLV、yamatake山武AZBIL、日本VENN阀天、TOYO东洋、德国ARI、美国阿姆斯壮ARMSTRONG、意大利ODE电磁阀、台湾SNW、台湾ST阀门、台湾317疏水阀,电话(TEL):0731-857151721587499646618773193115

上海羽通仪器仪表厂主营产品:开口闪点、闭口闪点、馏程、运动粘度、恩氏粘度、动力粘度、旋转粘度计等,为广大用户提供优良的产品和服务,是相关实验室的可靠选择!

集金钗石斛种苗培育、野生栽种、科技创新、产品研发加工、生态种植示范、乡村特色旅游观光为一体的新型现代化、规模化的综合型企业。

完美星座网致力于打造一个专业的的星座资讯站,提供最新最好的12星座运势查询、12星座配对、十二生肖配对、风水命理等相关内容。

吉林汽车网是吉林省地区的汽车网站,深得车友喜爱。吉林汽车报价栏目实时更新汽车报价、汽车优惠信息、汽车行情。吉林汽车网发布的报价信息是汽车新报价。请您支持吉林汽车网。

寿县黄桃采摘,寿县黄桃基地,寿县寿州锦绣黄桃基地,寿县锦绣园黄桃采摘。寿县寿州锦绣黄桃基地位于淮南市寿县迎河镇李台村。寿州锦绣黄桃基地2014年成立,每年产量80万斤左右。,占地面积360亩,农场投资800万元。

常熟市常新纺织器材有限公司提供停经架座,停经架,停经条,中托架,停经盒,纺织器材配件产品,主要销往山东,浙江,安徽,上海,江苏,苏州,嘉兴,无锡,广东等全国地区,致力于停经架研发,停经架生产,停经条研发,中托架生产,停经盒研发,停经条生产,停经装置配套服务

广东华记贸易有限公司,专注钢材贸易

网希为用户提供便民生活服务分类信息,您可以免费发布及查找各种二手物品交易、二手车买卖、房屋租售、招聘、兼职、求职、交友活动、宠物、生活服务等分类信息。商家免费广告发布平台,企业的商业供求信息黄页。


益智类型的游戏一直受到许多玩家的喜爱,每一局游戏不用花费太多的时间,闲来无事就能玩上一局,与此同时又能锻炼到玩家的专注度,那么2023盘点小游戏找茬集合有哪些,丰富且精美的图片让人不由自主地沉浸在其中,下面就让我们来看看耐玩的找茬手游大全推荐吧,1、,找茬小子,这是一款在微妙的图片中找出差异的游戏,玩家进入到游戏关卡中,在两种几乎一模...。
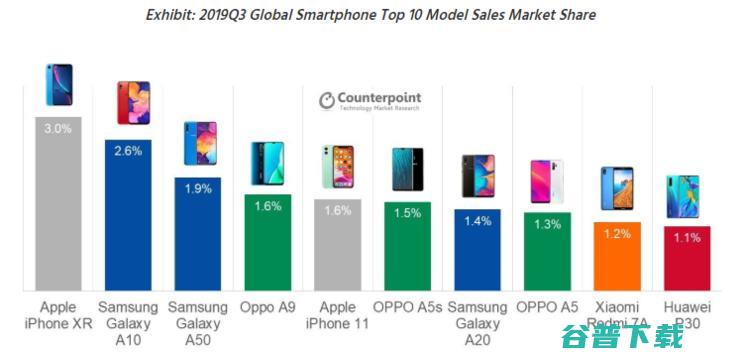
雷锋网消息,12月24日,Counterpoint发布报告,公布了2019年Q3全球最畅销的十款智能手机;其中,iPhoneXR位居首位,占据了3%的市场份额,这也就意味着,自2018年Q4以来,iPhoneXR于2018年Q3推出,,iPhoneXR一直是全球人气最旺的机型,我们简单看一下2019年Q3全球最畅销的十款智能手机的具体...。

5月20日,中国信息安全测评中心发布安全可靠测评报告,腾讯云Linux服务器操作系统,TencentOSServer,顺利通过测评,并获得安全可靠等级,I级,这标志着TencentOSServer的产品能力和自主研发实力得到了国家权威机构的认可,据了解,安全可靠测评通过对产品及其研发单位的核心技术、安全保障、供应链安全、持续发展等方...。
人们对机器人的抓取和操作存在很多误解,很多研究成果很难推进到实际应用环节,武汉大学李淼教授介绍,这是他放弃前往麻省理工MCubeLab,操纵与机制实验室,AlbertoRodriguez教授团队做博士后研究,选择回国创业的重要原因,李淼教授博士毕业于瑞士洛桑联邦理工学院,师从学习算法与系统实验室的创办者AudeBillard教授,...。

开年外贸旺季,3月新贸节,来临,阿里国际站连续发布跨境指数,帮中小外贸企业抓住商机,数据显示,在今年受到通胀、库存等因素影响的电子产品出口领域,投影仪、智能手表和充电宝等产品海外需求仍然旺盛,是新年可以抓住的重要机会,在投影仪、智能手表和充电宝这电子产品出口,三件套,中,投影仪正对应了前两点特征,性价比高的国产智能投影仪正在快速取代传...。

发表在当贝投影仪2024,2,2913,12当贝F6是一款性能配置出色的投影仪,搭载高端华为海思V811芯片,支持8K解码,更是配有游戏模式,避免玩游戏时出现高延迟情况,具体当贝F6如何开启游戏模式呢,下面就分享当贝F6开启游戏模式的详细图文教程,当贝F6如何开启游戏模式,1.打开投影设置在当贝F6主界面找到设置并点击打开;2.选择信...。

极米H2与H1S哪一款更值得入手,极米推出的这两款产品外形差距不大,但还是有不少的消费者关心这两款投影的区别,话说这两款产品到底哪款适合你,且听我慢慢道来~~外观极米H1S和极米H2延续使用了荣获CES创新奖、iF设计奖、红点设计奖等多项大奖H1的经典外形设计,同时H2把之前的三个触控按键变为了物理按键,音量调节也升级为了左右滑动;镜...。

0556491大神级投影控发表于2024,10,03要开启当贝D6X高亮版的HDR特性,需要确保满足以下条件,1.你的电视必须支持HDR,也就是说,它必须有足够的亮度和广色域来显示HDR内容,2.你的HDMI输出必须是HDMI2.0a或更高版本,以便支持HDR传输,3.你必须使用支持HDR的内容,这意味着你需要使用HDR视频、游戏或其...。

很多人都说,牙疼不是病,疼起来真要命,其实这句话并不完全正确,生活中很多小病小痛都是极其困扰人的,比如鼻炎,不仅影响自身生活,而且也影响外貌工程,但是现今鼻炎治还是比较困难的,大部分只是靠调理,方老祖鼻炎馆作为专业可靠的养生调理机构,自品牌建立以后收获粉丝无数,成功打出了招牌来,这不还有人问起了方老祖鼻炎馆怎么加盟的问题,关于方老祖鼻...。

是合资车,福特蒙迪欧是由长安福特引进并消费的中型轿车,属于合资车型,长安福特是福特汽车与中国长安汽车个人独特合资成立的合资企业,福特蒙迪欧是该合资企业消费的一款车型,合资车指的是由国际外两家或多家汽车制作商协作消费的车辆,联合了各方的技术和资源好处,以满足不同市场的需求,福特蒙迪欧的缺陷和好处是什么蒙迪欧是美国汽车品牌福特旗下的一款中...。
勿忘九一八撞钟鸣警仪式
易表.net,找到一套合适的数据管理软件并不容易:Access和Foxpro太复杂,并且要求用户具备一定的,您可以免费下载。
消息,当地时间1月6日,英伟达CEO黄仁勋发表了CES2025第一个主题演讲,正式拉开这场,科技春晚,的帷幕,长达一个半小时的主题演讲,黄仁勋带来了全新的RTX50系列显卡,并讲解了英伟达在AI、自动驾驶以及人形机器人等前沿科技领域的技术进展,演讲开头,黄仁勋回顾了英伟达的发展历程,从NV1让主机游戏成为可能、第一款GPUGeF...。

城市数字化转型已过时,数智化成为行业新宠,一字之差,不只是概念之别,技术、产业、市场需求都发生了质变,数智化催生出万亿蓝海市场,碎片化场景给AI带来新考验,新的商业模式正在形成,在城市数智化转型中,AI应该扮演怎样的角色,这是个必须回答的问题,时代背景下,企业也需要新的方法论,来实现技术价值的商业闭环,基于此,AI掘金志再次站在...。

作者,田哲、洁萍、永昌对于汽车产业而言,上海这一座巨型机器停止运转许久之后,迎来了重启的先兆,就在昨天,上汽集团复产复工压力测试下的首台车宣布下线,同日,特斯拉上海超级工厂复工,已经有近1万名员工到岗,作为汽车产业的两大龙头企业,已经为上海复产复工打响了第一枪,在为上海复产复工欣喜鼓舞的同时,我们也看见了行业中一些真实现状、听到了一些...。

3月29日,中国信通院可信区块链推进计划,TBI,第十一次全会在杭州召开,会上,中电长城网际系统应用有限公司、贵阳大数据交易所、蚂蚁链三方牵头成立数据可信流通项目组,面向数据要素流通探索融合技术、应用体系和典型场景,建立数据可信流通的相关标准和技术规范,据了解,这是TBI首个专注于数据要素研究的项目组,除3家联席组长外,腾讯云、华为、...。

发表在专业问答2020,1,1413,46自制投影仪幕布主材料需要涂银窗帘布,副材料需要作木框用木条、乳胶、魔术贴、黑色喷漆等就可以自己制作一张投影幕布,自制投影仪幕布材料主材料,涂银窗帘布辅材料,作木框用木条、乳胶、魔术贴、黑色喷漆详细步骤一、作木框用的木条二、用乳胶、铁码把木框装起来如果不够硬朗,用码钉枪打门型钉加固,三、裁剪幕布...。
